Demo concert
Installation
Rocon Install
- https://github.com/robotics-in-concert/rocon#installation
- Troubleshooting
- When following error occurred, please refer to installation of ros
Demo Concert Install
> cd <your rocon workspace>
> cd src
(Try to launch simulation demo concert)
> wstool merge https://raw.githubusercontent.com/robotics-in-concert/rocon_demos/demo_concert/rosinstall/demo_concert_sim.rosinstall
(Try to launch real demo concert)
> wstool merge https://raw.githubusercontent.com/robotics-in-concert/rocon_demos/demo_concert/rosinstall/demo_concert.rosinstall
> wstool update -j10
> cd ..
> yujin_make --install-rosdeps
> yujin_make
> . .bashrcWorkflow engine installation
- Install Node
- Install concert_workflow_engine_blockly dependency
> roscd concert_workflow_engine_blockly
> npm update- Note that
npm updatewould ask sudo access to install node-canvas dependency
Preparation
- Configure ROS environment variables and concert name
> export ROS_HOSTNAME=<your pc ip> (ex. export ROS_HOSTNAME=192.168.10.24) > export ROS_MASTER_URI=<concert pc ip> (ex. export ROS_HOSTNAME=http://192.168.10.24:11311) > export CONCERT_NAME=<concert name> (ex. export CONCERT_NAME=demo_concert)
Execution
Pick up only solution
-
Configure the pick up service environment
> roscd demo_concert/configurations > source pickup_online_webapp.sh -
Import world canvas database
-
Launch the concert for importing world canvas annotation.
> roslaunch demo_concert concert.launch --screen -
Open new termianl.
> cd <your rocon workspace> > . .bashrc > rosservice call /software/world_canvas/yaml_import `rospack find demo_concert`/annotations/yujin_rnd_fulldb.yaml -
When you check following message, terminate the concert by
ctrl+cat the terminal launched it.result: True message: ''
-
-
Re-Start pick up service with following command
> rocon_launch demo_concert pickup_sim.concert --screen -
Pickup order
-
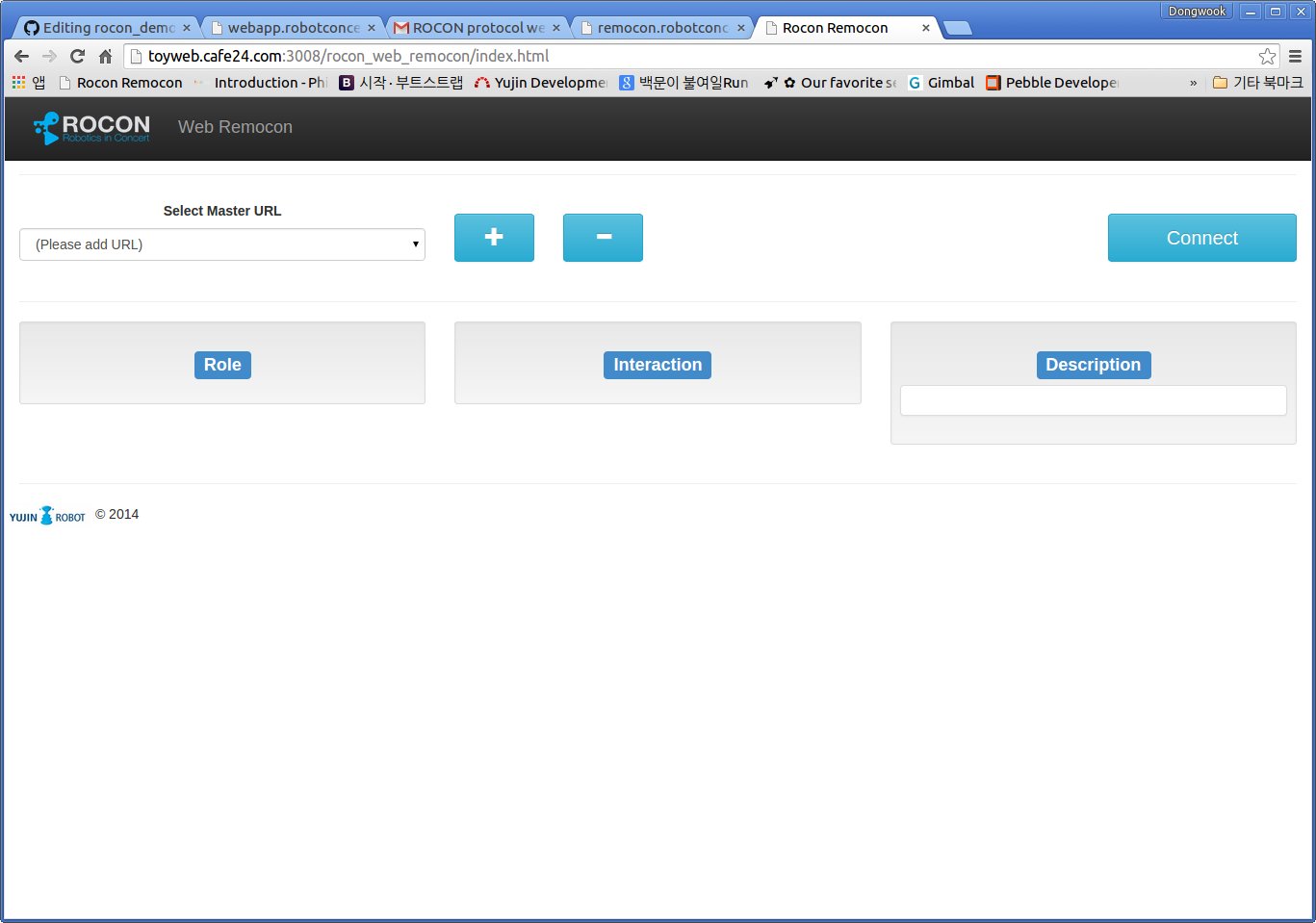
Open Web Remocon(http://remocon.robotconcert.org)
-
Click the
+and add the your master ip of concert (default: ws://localhost:9090) -
Click the
connectto connect concert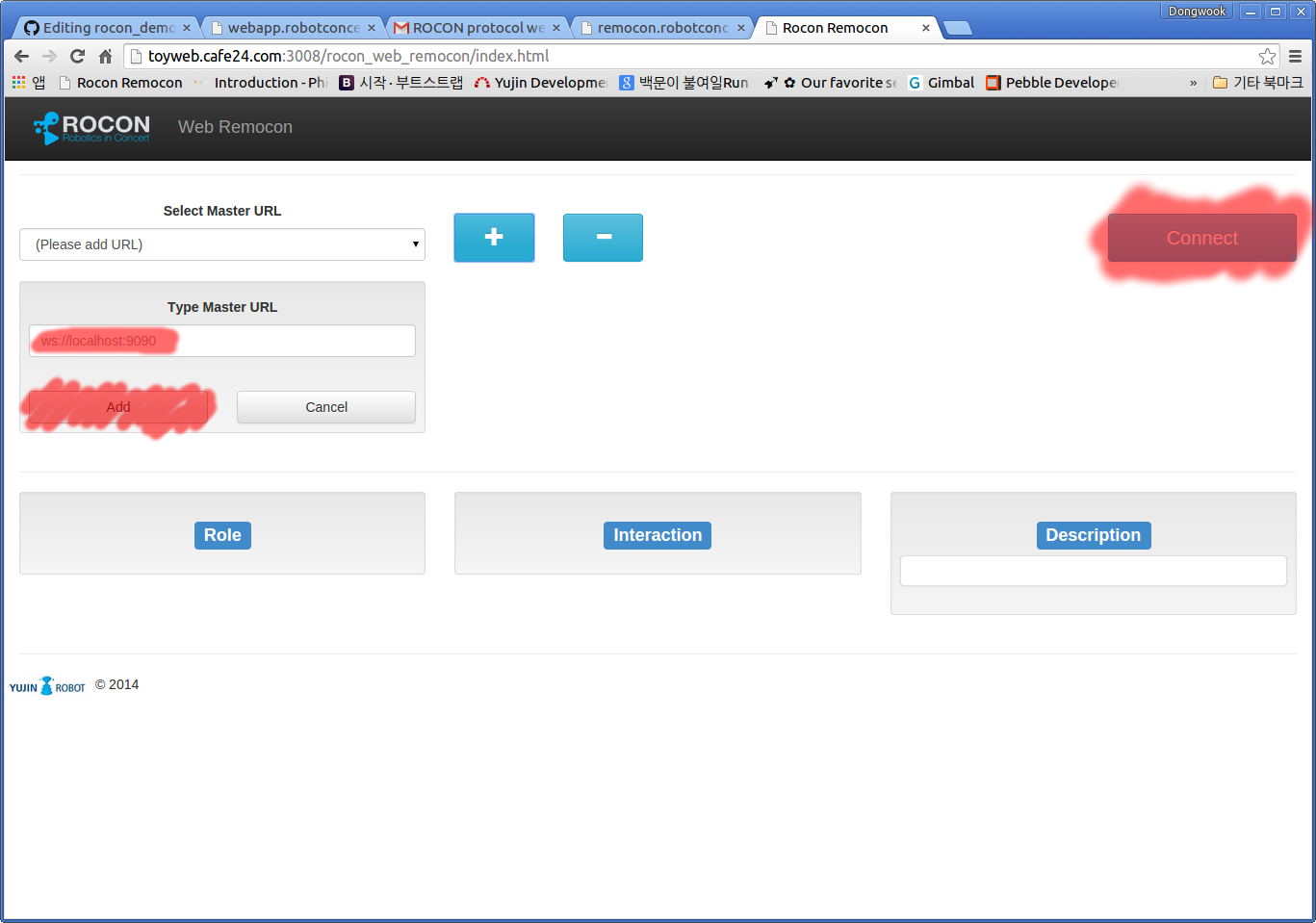
-
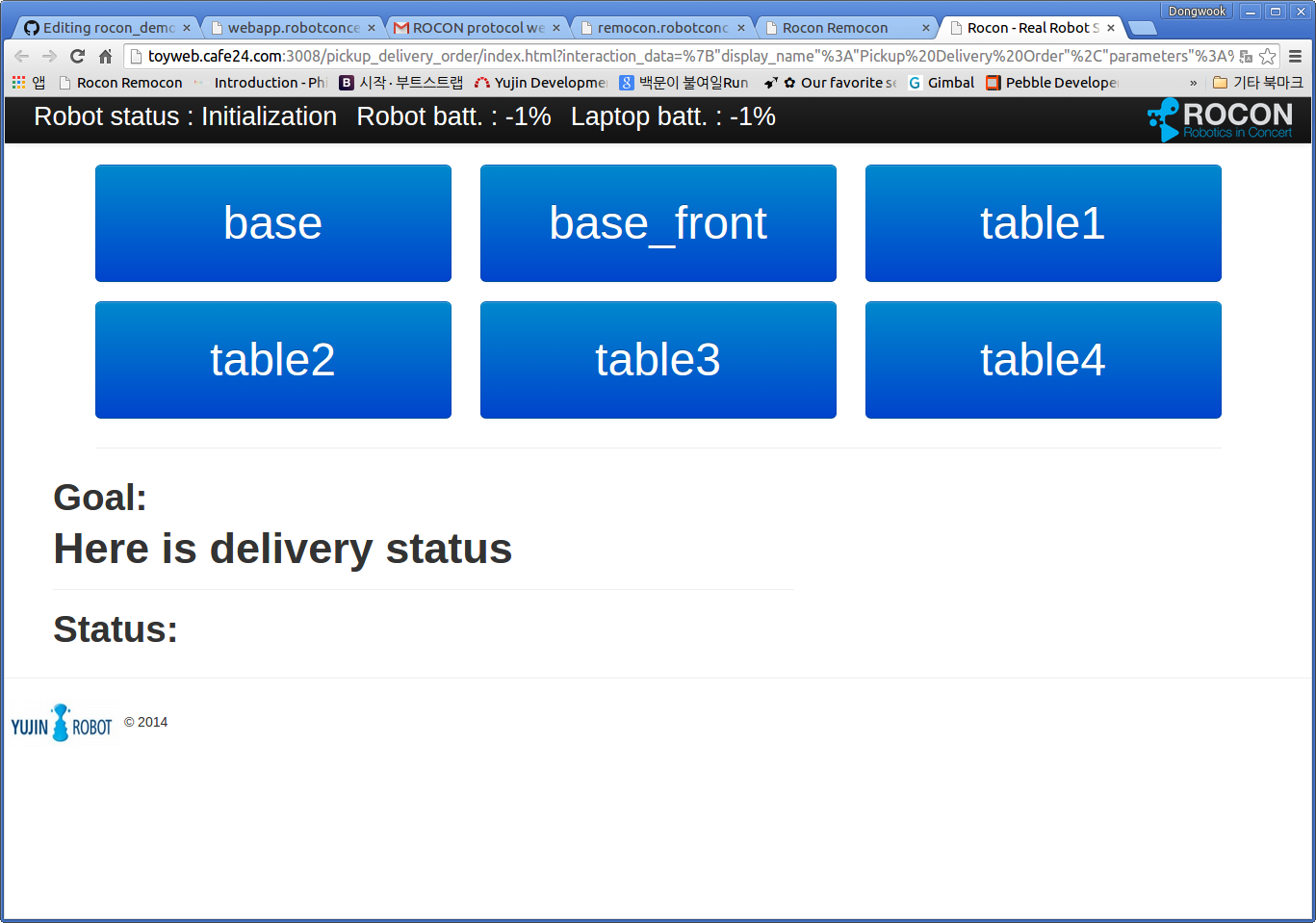
To open order app, choose the role
customer, interactionpickup delivery orderand start app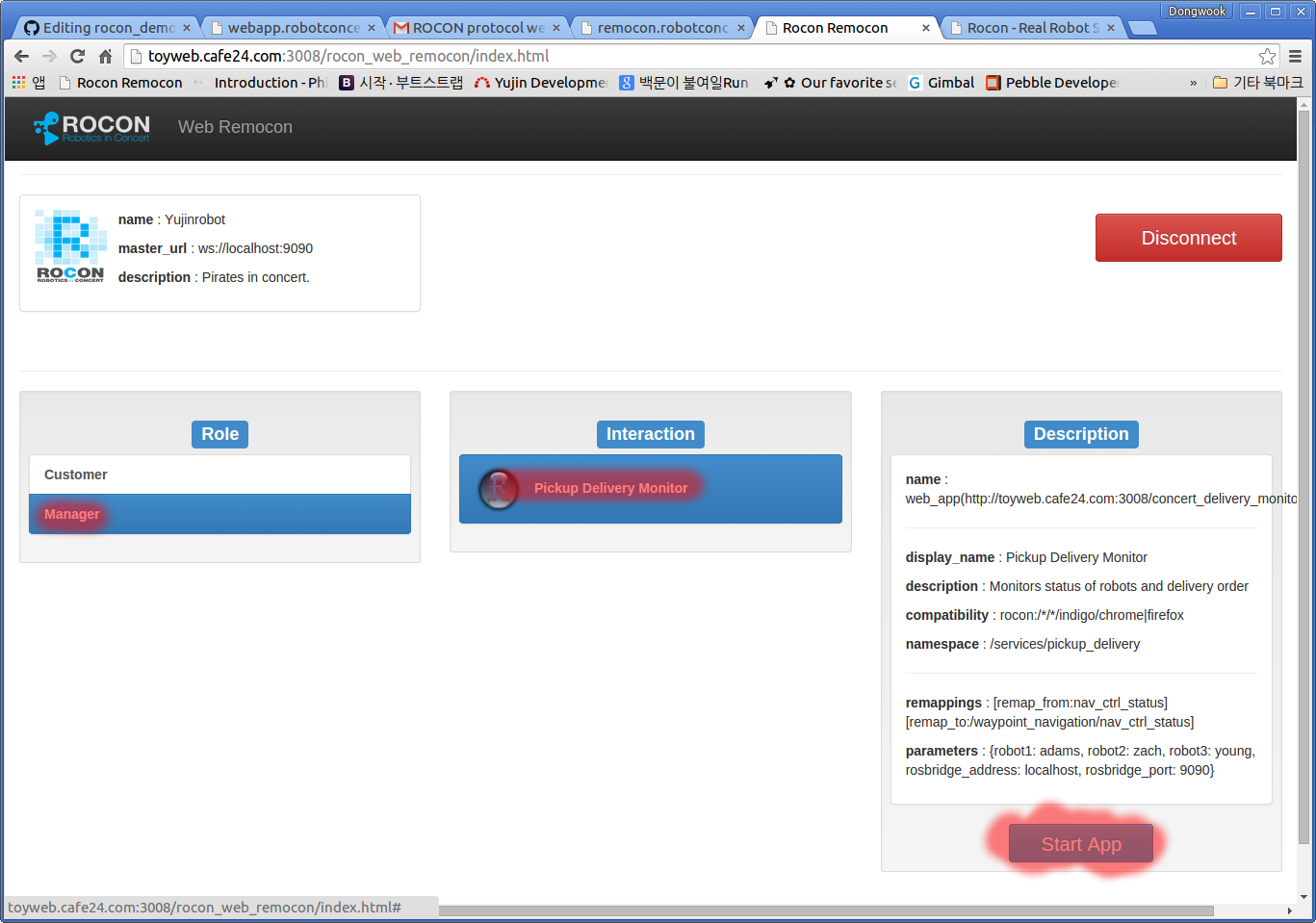
-
-
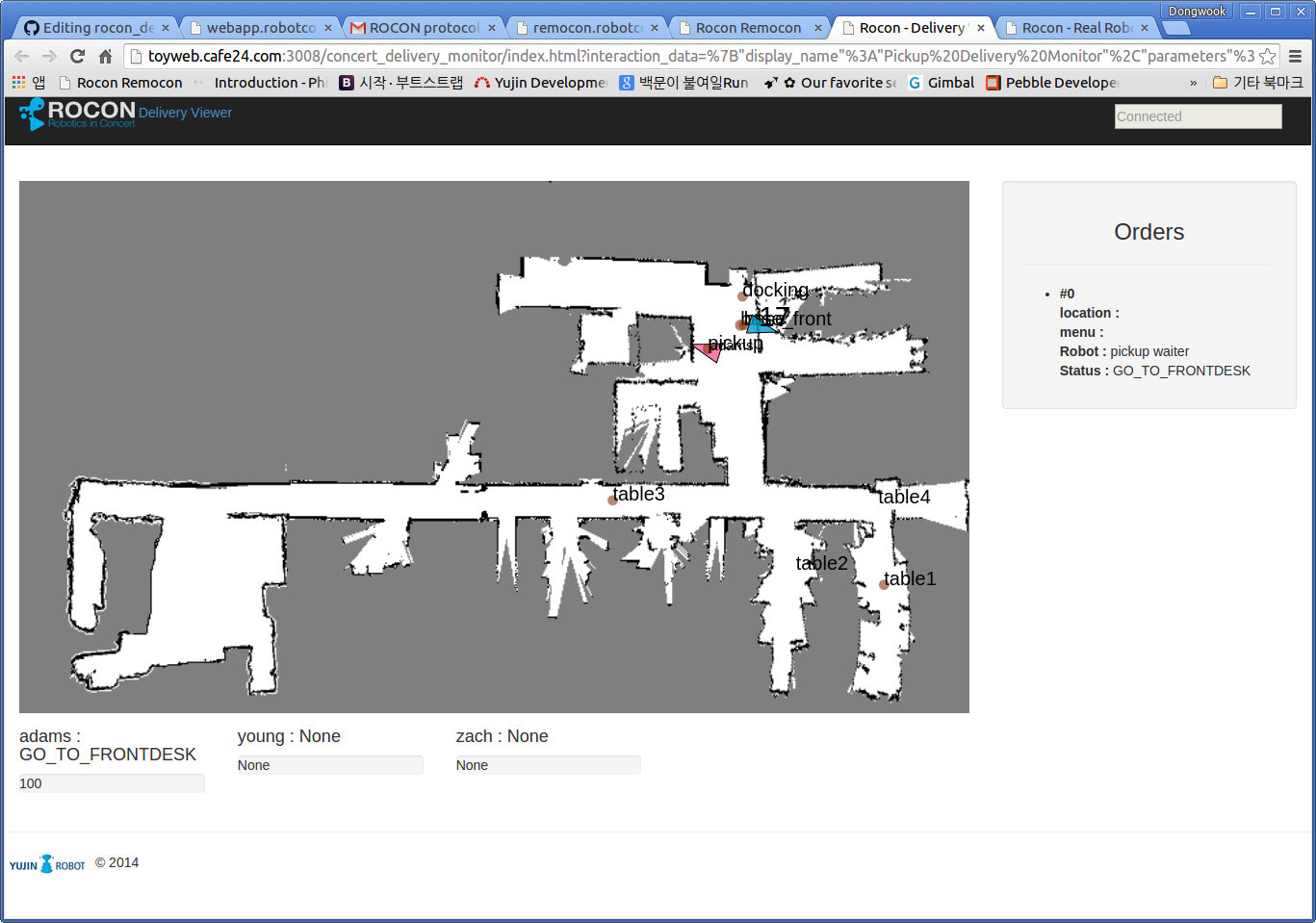
Delivery Monitor
- To launch delivery monitor app, choose the role
manager, interactionpickup delivery monitorand start app
- To launch delivery monitor app, choose the role