 IamPete1
commented
3 years ago
IamPete1
commented
3 years ago The clear change is that we have gone from using Z stopping point to 'no descent'. This commit puts that back.
https://github.com/IamPete1/ardupilot/commit/407faabedaf980b32e84aaaa21dcd63472e96894
But I suspect it is not so easy as that, the underlying methods have also changed.
 Hwurzburg
Hwurzburg lthall
lthall
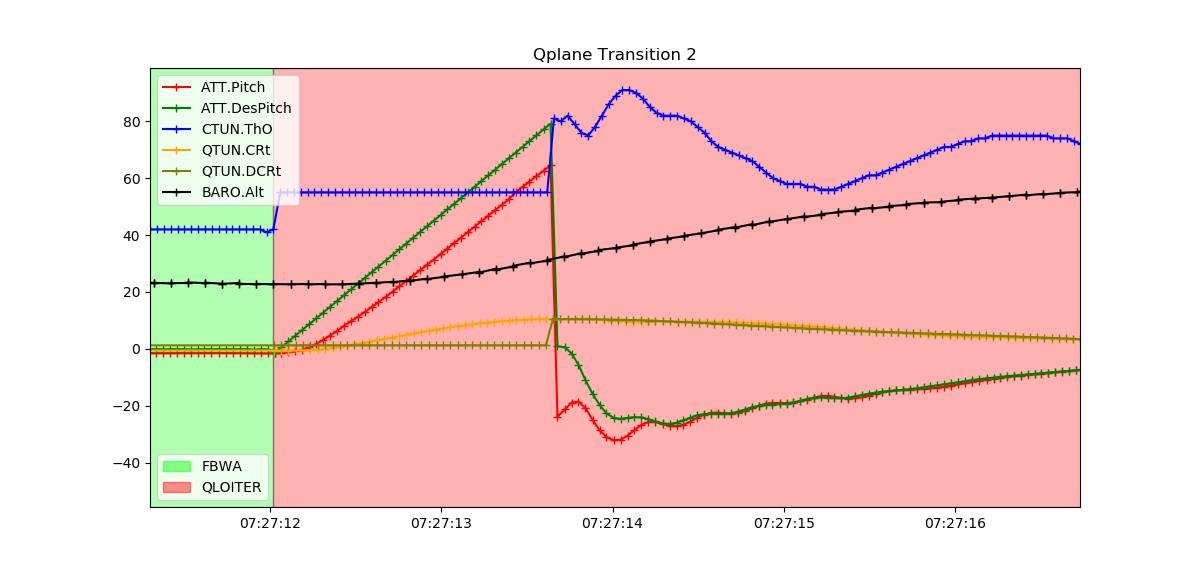
while working with the HWing tailsitter discovered that the FW->VTOL transition inits z controller to current climb rate for demand instead of resetting it as it did prior....result is massive zoom after transition as climb rate demand remains and slowly decays....changing Q_ACCEL_Z also does not correctly reduce velocity, in fact, raising it actually slows the decay of climb rate...an additional issue
since HWing does not work in Stable, used TVBS SkyCat for these graphs to show problem
Stable behaviour....climb rate reset to zero or less depending on stick input upon transition to QLOITER is completed...very minor zoom due to inertia master behaviour.....climb rate set to current and decays (but changing Q_ACCEL_Z has little effect and can actually slow velocity reduction) resulting in prolonged climb at start of pure VTOL
master behaviour.....climb rate set to current and decays (but changing Q_ACCEL_Z has little effect and can actually slow velocity reduction) resulting in prolonged climb at start of pure VTOL
checked master also at April point and behavior was correct...something changed in z controller init and operation I think Platform [ ] All [ ] AntennaTracker [ ] Copter [ x ] Plane [ ] Rover [ ] Submarine