 Ivosch
commented
1 year ago
Ivosch
commented
1 year ago anyone?
Closed Ivosch closed 4 months ago
Ivosch
commented
1 year ago anyone?
 oloendithas
commented
1 year ago
oloendithas
commented
1 year ago The weird thing I noticed is that it totally breaks if I set RC*_OPTION=94. The best I was able to get out of it is to switch automatically between Pit and MAX power on arm/disarm. My chaotic desperate settings are: Half-Duplex, TX_PullDown, TX_NoDMA, Pit, Pit on DIsarm.
 Kopervlad
commented
1 year ago
Kopervlad
commented
1 year ago Hello all, I had an isuue just like Topic Starter (Ivosch). I can to control my VTX from INAV. But I can't in ArduCopter (Mission Planner 1.3.8479.20539).
Version ArduCopter V4.3.7 (c8506ed4)
Platform [ ] All [ ] AntennaTracker [X] Copter [ ] Plane [ ] Rover [ ] Submarine
Airframe type X-CopterFrame
Hardware type FC Matek F405-TE VTX Jhemcu RuiBet Tran-3016W 25-1600mW The same like TS has.
Logs What logs do you need? How to download it?
I was trying to activate and setup VTX control using IRCTramp. It didn’t work at me too. Even BAND and Channel. And is it true that MP have no possibility to set POWER more than 1000 mW?
Configured parameters:
and with SERIAL5_OPTIONS 0 was tried also (and many other :) )
and
and RC14_OPTION set to 94
Help me please to solve this problem. With love from Ukraine!
 andyp1per
commented
1 year ago
andyp1per
commented
1 year ago TE does not have this built in by default - please use the custom build server to get a firmware version with this feature
Kopervlad
commented
1 year ago I don't know how to do it yet. Will learn. UPD: learned ))
So You mean that INAV FW has it built in and ArduCopter doesn't?
andyp1per
commented
1 year ago ArduCopter on 2Mb boards has it built in, on 1Mb boards it does not
Kopervlad
commented
1 year ago Do I understand correctly, You mean 1M and 2M it's a size of FW?
If Yes, then in this folder:
I need arducopter.hex file instead arducopter.apj?
Or it's from another opera? )))
Kopervlad
commented
1 year ago Thanks! I did a custom FW with IRC. It works now. But still can't increase Power more than 1000 mW. In my case 800 mW respectivly (nearest to low side). VTX power levels PIT/25MW/200/400/800/1600MW Looking for solution.
oloendithas
commented
1 year ago Did you set VTX_MAX_POWER and VTX_POWER to 1600? And disable all PIT options fot test on the bench. Also, the issue I couldn't beat is these settings are completely unresponsive if I set Tramp control to some RC (option 89 as far as I remember). So the best I could get is to switch to max on arm and to pit on disarm.
Kopervlad
commented
1 year ago Thank you very much for your help. In my case it is very important to switch at least between 25/400/1600. Let me remind you, I am from Ukraine))) and this is really one of the important tasks for me. Maybe some logical switches etc.?
Kopervlad
commented
1 year ago ArduCopter on 2Mb boards has it built in, on 1Mb boards it does not
I will be very grateful for your help
oloendithas
commented
1 year ago In my case it is very important to switch at least between 25/400/1600.
Ok, I've made a LUA script and tested it. Looks working. You gonna have to assign some 3-pos switch to scripting_300.
On my setup the actual switch happens with a slight delay, in around 5 seconds, also looks sensitive to quick switching, may not switch to the last value. Also you can display the current VTX power on OSD.
Again, you'll need to disable all PIT options from VTX_OPTIONS.
` local scr_rc_300 = rc:find_channel_for_option(300) local VTX_POWER = Parameter() --creates a parameter object VTX_POWER:init('VTX_POWER') --get the physical location in parameters memory area so no future name search is done
function vtx_switch() local rc_connected = rc:get_pwm(2) > 0 and rc:has_valid_input() and scr_rc_300 if rc_connected then local sw_pos = scr_rc_300:get_aux_switch_pos() vtx_toggle(sw_pos) end end
function vtx_toggle(sw_pos) local current = VTX_POWER:get() --retrieve that parameters value and assign to "parameter" if sw_pos == 0 then if current ~= 25 then gcs:send_text(0, "Current VTX power " .. tostring(current)) gcs:send_text(0, "Setting VTX power to 25") end VTX_POWER:set(25) elseif sw_pos == 1 then if current ~= 400 then gcs:send_text(0, "Current VTX power " .. tostring(current)) gcs:send_text(0, "Setting VTX power to 400") end VTX_POWER:set(400) else if current ~= 1600 then gcs:send_text(0, "Current VTX power " .. tostring(current)) gcs:send_text(0, "Setting VTX power to 1600") end VTX_POWER:set(1600) end end
function update() vtx_switch()
return update, 1000 end
return update() `
How familiar you with LUA scripts? Do you need help with applying it? I'm not sure if F405 can handle scripting, but if it can, maybe the HEAP size should be lowered.
 pereverni
commented
4 months ago
pereverni
commented
4 months ago Thanks! I did a custom FW with IRC. It works now. But still can't increase Power more than 1000 mW. In my case 800 mW respectivly (nearest to low side). VTX power levels PIT/25MW/200/400/800/1600MW Looking for solution.
Hey man, I need some help with the exact same question. Would be grateful for your help. I'm from Ukraine too btw
andyp1per
commented
4 months ago
Bug report
Cannot set maximum (1600mW) VTX power, it works somehow but not properly. 800mW and lower powers are ok when setting VTX_POWER. Controlling power with RC11 is somehow inconsistent. When RC11 is at max level (2000), OSD reports 1000mW. For RC11 at 1000 it is 0mW. Channel and band control works fine.
I have same VTX on betaflight, settings: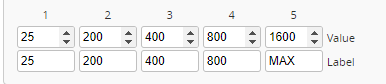
Communication seems to be set properly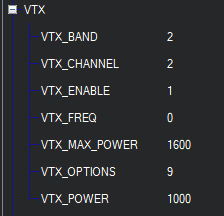
I tried to ask in forum, https://discuss.ardupilot.org/t/matek-h743-irctramp-1600mw-doesnt-work/93157, but no reactions.
Version ArduPlane V4.3.1 (7d0c6e4d)
Platform [ ] All [ ] AntennaTracker [ ] Copter [X] Plane [ ] Rover [ ] Submarine
Airframe type Wing - ZOHD talon gt
Hardware type Mateksys H743-wing v3 VTX Jhemcu RuiBet Tran-3016W 25-1600mW
Logs What logs do you need? How to download it?