 felixchenfy
commented
5 years ago
felixchenfy
commented
5 years ago Also, in function "def calc_covariance",
the covariance should be divided by the number of samples.
The current code is:
def calc_covariance(xEst, px, pw):
cov = np.zeros((3, 3))
for i in range(px.shape[1]):
dx = (px[:, i] - xEst)[0:3]
cov += pw[0, i] * dx.dot(dx.T)
return cov AtsushiSakai
AtsushiSakai regexident
regexident malleshamdasari
malleshamdasari
In the current code in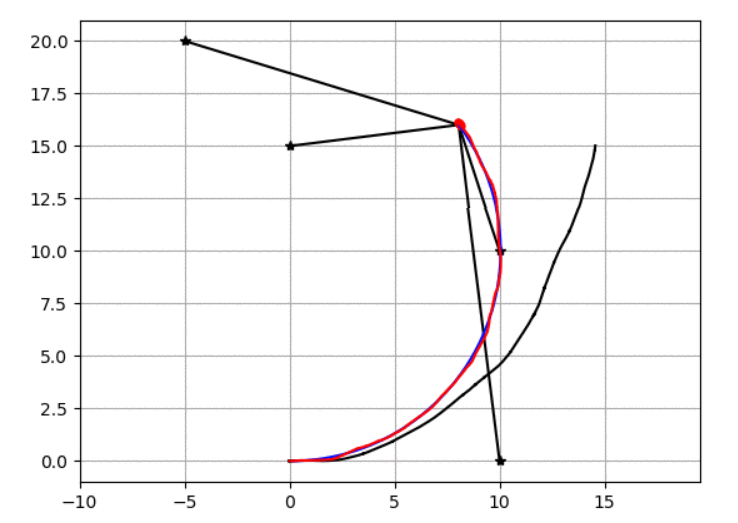
Localization/particle_filter/particle_filter.py,the resultant true trajectory is a circle, as shown below:
(The blue line under the red line is the true trajectory, which is a circle. The figure is copied from README)
However, due to the noise (e.g., wheel slips, noise in the motor), the true trajectory cannot be a perfect circle. So the code might be wrong.
In my view, the "true trajectory" and "dead reckoning trajectory" needs to be swapped inside the function
def observationto solve the error.Besides, for the random noise, I think
should be replaced by:
(Because Rsim is the variance)