 APMonitor
commented
3 years ago
APMonitor
commented
3 years ago Those all look like great parameters to read in. There is a difference between tr_hi and trs_hi with trs_hi using a slack variable to calculate the trajectory. Some of the parameters change based on options selected such as when m.options.CV_TYPE=1 or m.options.CV_TYPE=2. Because these aren't used by many and they change based on the options, I've always thought of these as extra variables that someone can read in if interested.
m.solve()
# get additional solution information
import json
with open(m._path+'//results.json') as f:
results = json.load(f)
plt.plot(m.time,results['v1.tr'],'k-',label='Reference Trajectory')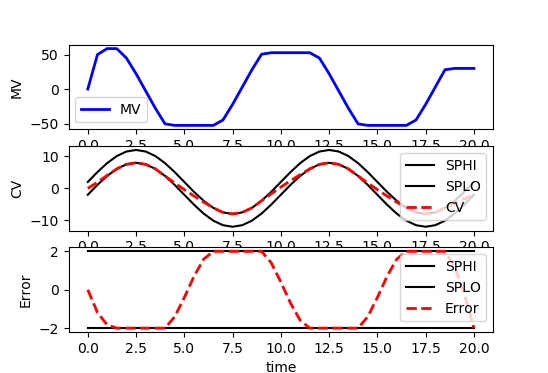
CV setpoint trajectories (
trortr_hi/tr_lo) are reported in results.json and used in GUIs, but not loaded to python. It would be nice to read these into the associated python CV variables for local plotting.When are these parameters reported?
CV.STATUSmatter) ?trforcv_type=2andtr_hi/tr_loforcv_type=1?While we're at it, there are a few other parameters in results.json that might be worth reading, such as
bcv,tau,trs_hi,trs_lo,sp_hi,sp_lo,err_hi,err_lo,bias,wsp_hi,wsp_loandcost. Some of these are not documented (eg what is the difference betweentr_hiandtrs_hi?). Some of them appear to be the same as constant values already reported (such assp_hiandbias) -- are they different?