 tomvanmele
commented
5 years ago
tomvanmele
commented
5 years ago i will have a closer look tomorrow, but, if i remember correctly, the algorithm indeed only allows for one interface between two blocks (there can be only one edge between two vertices of the assembly network). this, in part, has to do with how RBE works and therefore should not be a constraint for the general assembly data structure. however, it is also not trivial to encode this properly with the network data structure because there can be at most two edges between any two vertices (if they are in opposite directions). to have more edges than two between any two vertices we need a multigraph implementation...
 yck011522
yck011522
Describe the bug I have a test data of three blocks. See attached image.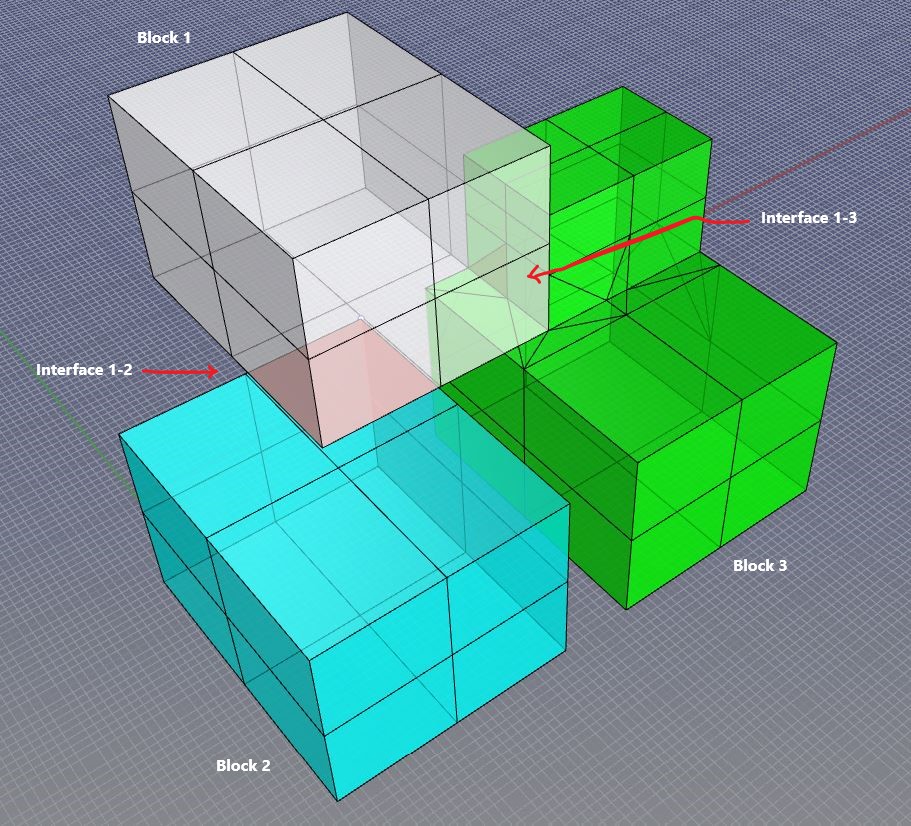
I used the following code to compute the interface:
I expected Interface 1-3 (marked in red) to return all the intersecting faces between the two blocks. Or is this function designed to only return one face pair?
I digged ito the code of
compas_assembly/datastructures/interfaces_numpy.pyBut I couldn't understand the code logic, so maybe I'll ask here. I also looked into paperData management and modelling of complex interfaces in imperfect discrete-element assembliesbut there wasn't any mention of the code behaviourTo Reproduce Steps to reproduce the behavior:
Expected behavior I expect all of the intersecting faces to be return.