 sloriot
commented
3 years ago
sloriot
commented
3 years ago I think this is the "expected" behavior. In the original publication you see: Since the proxies can be seen as approximate faces of the final mesh, we must put vertices at the intersection of the proxies. Thus, we create an anchor vertex at every original vertex where three or more regions meet. In order to account for every region, we then check whether each region boundary has at least three anchor vertices attached to it; if not, we simply add anchor vertices accordingly as it will guarantee the presence of at least one polygon per region. The spatial position of these anchor vertices is determined as follows: foreach neighboring proxy of an anchor, we compute the projection of the associated vertex from which the anchor was created onto the proxy(i.e.,its ideal position for this proxy); we then simply average these projections.
You have such an issue because you have several sheets at the corner with many self-intersections that the package try to approximate:

 dmitrykudinov
dmitrykudinov
Please use the following template to help us solving your issue.
Issue Details
When applying
VSA::approximate_triangle_mesh()on a triangular mesh, I'm getting some of the resulting vertices shooting off the original geometry. I tried usingPMP::orient_polygon_soup()as a preprocessing step, but it made no difference.Before VSA: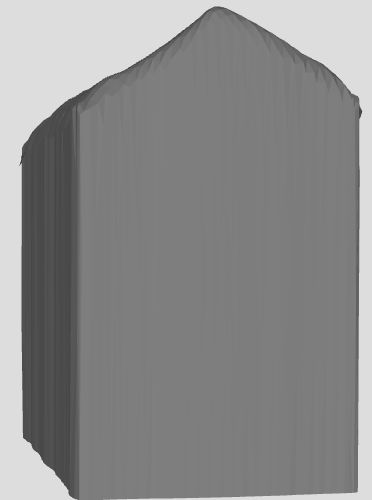
After (look at the far-left wall/corner) :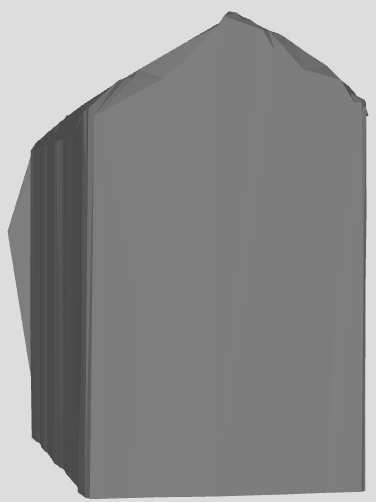
Source OBJ can be found here
Source Code
Environment