 osterwood
commented
4 years ago
osterwood
commented
4 years ago I am seeing this too. I think the issue is caused by a failed I2C transaction. While the monitoring script is running and reading the UCS2113 devices, the Hub MCU is reading from them too (at 10 Hz).
If the script and the Hub MCU start a read at the same time, the I2C read will fail and the drive just pops the error back to the caller. The firmware handles this multi-master conflict with a retry (see https://github.com/CapableRobot/CapableRobot_USBHub_Firmware/blob/6c7a4457039de24e87f729ee6df2c761de3fbe20/capablerobot_ucs2113.py#L46:L55)
After adding a time.sleep(0.01) prior to the power read in your script, the next test ran 5x longer than any previous running I had seen (with a rate of about 50/sec instead of 150/sec that I was seeing previously) -- due to reduced probability of contention.
Pausing the MCU I2C activity (via opening serial connection and entering the CircuitPython REPL), and running the script did not result in an error for over 10 minutes (after which I killed the script and wrote this).
 jynik
jynik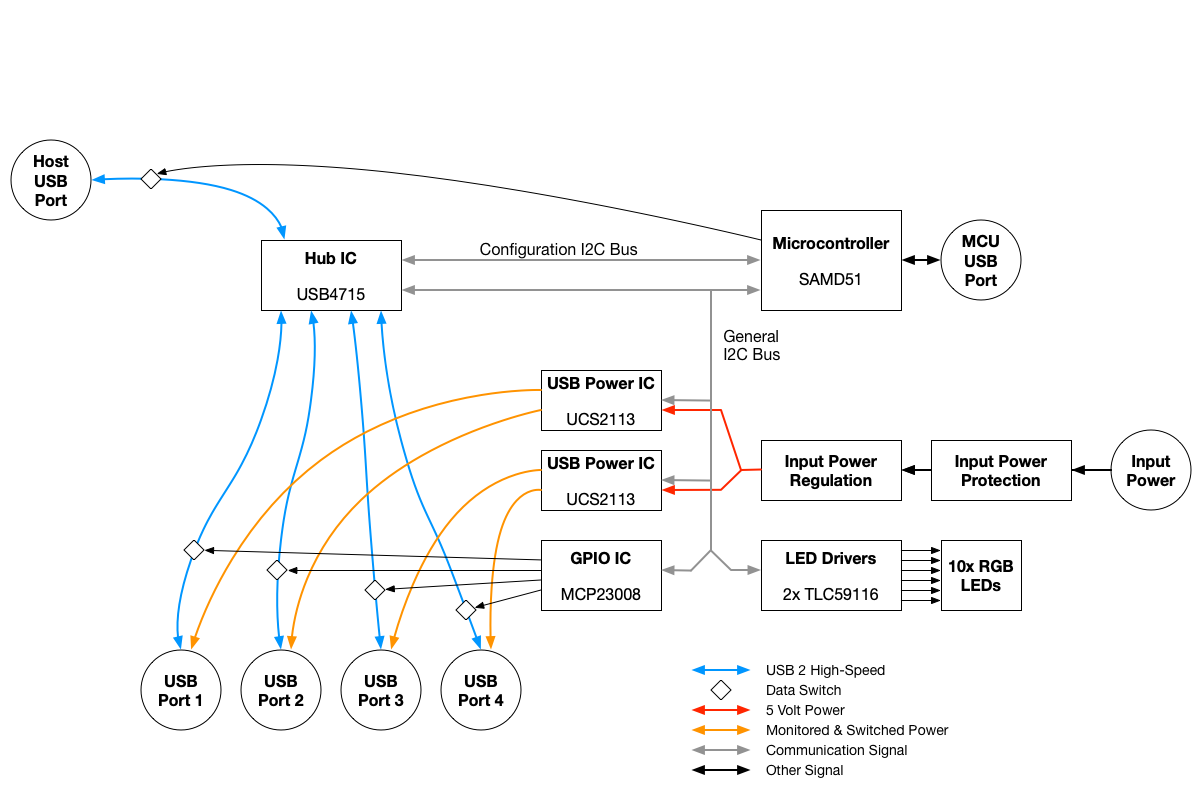
When running the script provided in #3, I've been encountering control IN requests failing with a URB status of "Broken Pipe" (-EPIPE). Below are the details in a Wireshark usbmon capture.
I'm curious to see if anyone experiences this as well, or if it's unique to my setup. Admittedly, I have quite a bit going that could be causing be trouble, including VMWare and nested hubs.