 Hermanoid
commented
2 years ago
Hermanoid
commented
2 years ago Deepstream is what my heart initially goes for, especially if we could interop it with something like Keras for ease of setup. Just how much slower is Keras (with Tensorflow backend) than Torch? I've had a beautiful experience with Keras for training, and it's fairly GPU accelerated for training. Also... Torch looks tres difficile to program with 😬
 yameatmeyourdead
yameatmeyourdead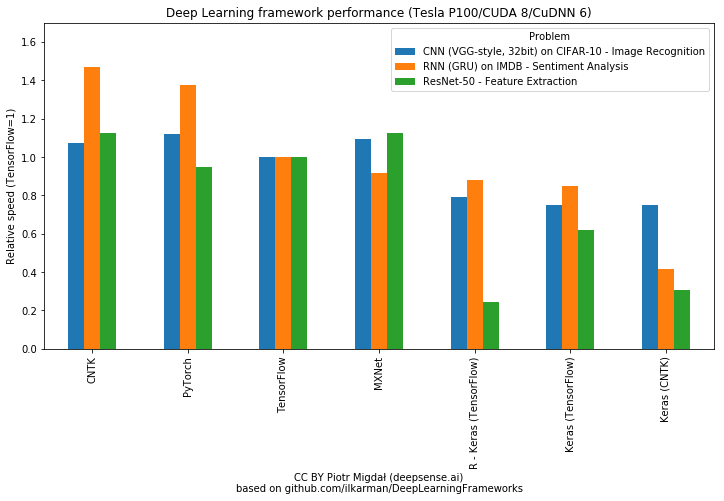{kind=link}
Decide between/conjunction of:
OpenCV
Tensorflow
Deepstream
Torch (fast for training, more memory usage, easier to setup)
Keras (very slow but easily readable)