JCaporuscio
commented
3 years ago
JCaporuscio
commented
3 years ago Looking at your test, the issue is with the test setup itself: https://github.com/Piphi5/CTRESimTest/blob/8782b0d20f955ecc01e7154ed342e5501e851c3f/src/test/java/frc/robot/CTRETest.java#L24
The Phoenix simulation elements don't support manually stepping the timing - they operate in real time. So your objects don't have enough time to react and you're actually reading back the initial conditions.
This can be worked around by inserting a delay with the step timing. Keep in mind you also need to account for the time it would normally take for new data to come over the CAN bus - so if the data you need is sent every 20 ms you need to account for that in addition to the time you need for the system to react. https://docs.ctre-phoenix.com/en/stable/ch18_CommonAPI.html
 Piphi5
Piphi5
Calling
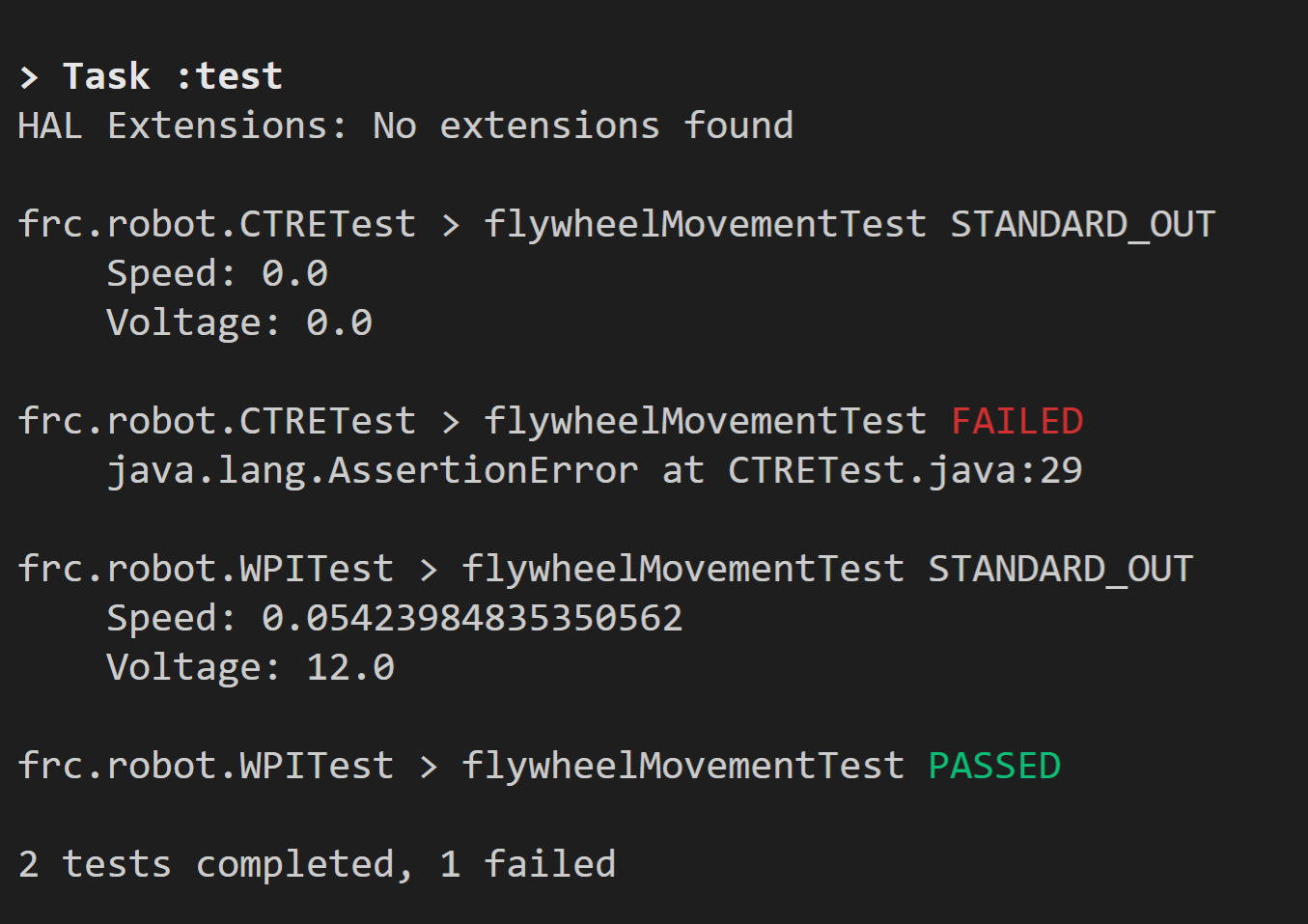
getOutputMotorVoltage()in JUnit simulation seems to return zero and ultimately interfere with the entire system simulation. More information here.Steps to reproduce:
build.gradleandTest Robot CodeExpected Behaviour:
When running the unit tests, the CTRE test should pass the unit test with a non-zero speed and voltage printed out to the console (see the WPILib Test as a reference).