 samiamlabs
commented
5 years ago
samiamlabs
commented
5 years ago A possible reason for this error is that flatpack apps like UnityHub (.appimage) don't pick up environment variables properly on all operating systems. When you have installed a release of Unity you should be able to open the Unity editor directly in a terminal from the install path with the workspace sourced. Hopefully this will fix the linking problem.
This project was developed mainly on Windows 10 and support added to xenial. Have not tried running it on bionic yet except for compiling the release. There may still be some cross platform issues that I need to fix.
Will try to get the example project running on my system with bionic later today and make sure that it works.
 b2220333
b2220333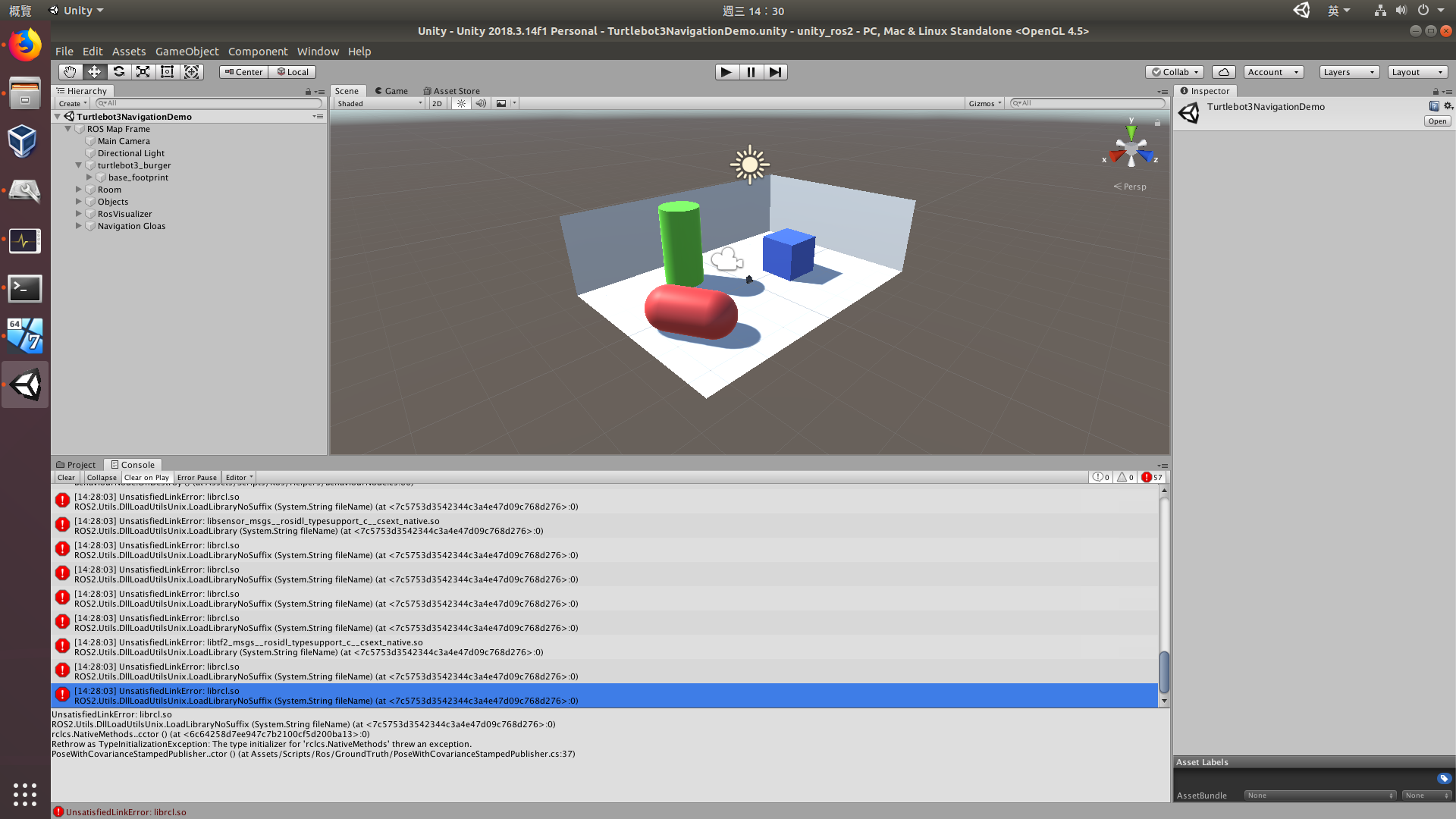
I can not find 2018.3.6f1 on Unity Hub 1.5.0, so I use 2018.3.14f1.
I open Turtlebot3NavigationDemo scene and click the play button, and it shows errors:
This error shows on many items on unity3d.
I am able to find librcl.so by
How to solve this problem? Thank you~
Sam