 EFeru
commented
3 years ago
EFeru
commented
3 years ago Hi Pierluigi,
You are very quick in seeing this functionality :smile: I just did the sideboard implementation and next is the main board. The main board is not yet prepared to accept the data. I hope to do it soon. My intention is to have dual input support, so I can control my Hovercar with both pedals on ADC and RC transmitter via sideboard.
So it is clear why you have the 3 beeps. It is not yet ready. I will let you know when is done :wink:
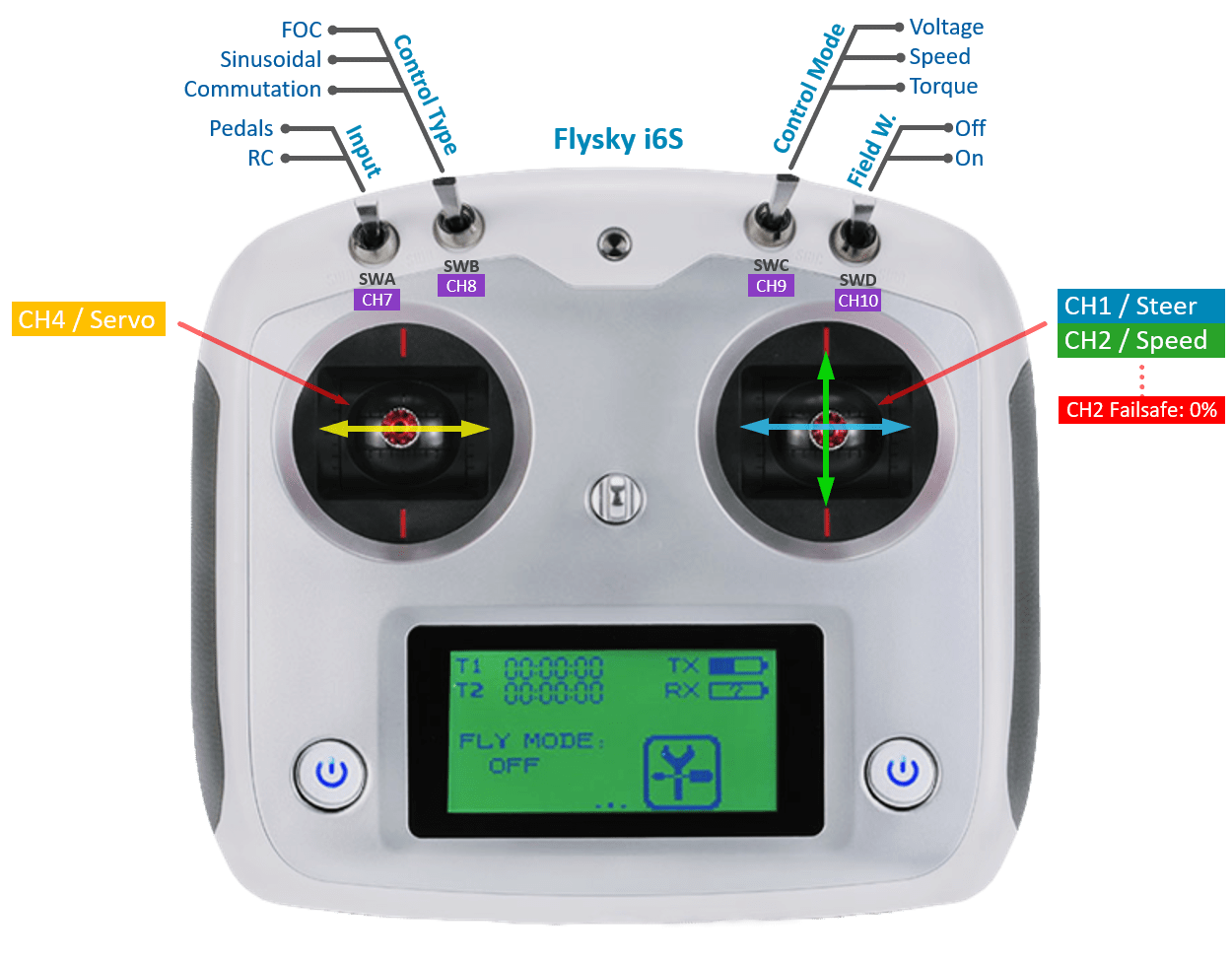
And yes the blue board version is indeed a bit more difficult since the pins are not routed. But is doable. Meanwhile you can give a try with DEBUG variant on sideboard, and a serial terminal to check that is able to get data from Transmitter. It should read 2 channels and the switches (which i intend to use for switching modes)
 pigiit
pigiit

 2com68
2com68





 fluppie
fluppie Candas1
Candas1

 Or somewhere else?
Or somewhere else?
Hi Emanuel,
I like the idea to connect an R/C receiver with iBus protocol on the aux serial port,
I was able to control the hoverboard using the following setup: my Tx-> Rx -> Arduino Mega (5V and 2 serial ports) -> main board (on serial 3),
but the rx connected to the sideboard is a great improvement
I did the mod on the sideboard, not easy on the "blue" board model I have, but it is feasible. I flashed main (variant usart) and side board (variant hovercar) with new firmware but I cannot control the wheels from my remote controller (error code 3 beeps)
Please can you help me with the right configuration in order to control the hoverboard with a remote controller on the sideboard?
Thanks
regards Pierluigi