 EdwardLiuyc
commented
2 years ago
EdwardLiuyc
commented
2 years ago If you notice the 5th line of the mapping_lidar_imu.sh, there is a file urdf/test2.urdf loaded by the main process to set transforms among different frames. You may need to adjust this file with your frame ids. Here is a reference for urdf.
Next to that, it's also supported to listen to /tf to set transforms.
 duongthao1218
duongthao1218




When I run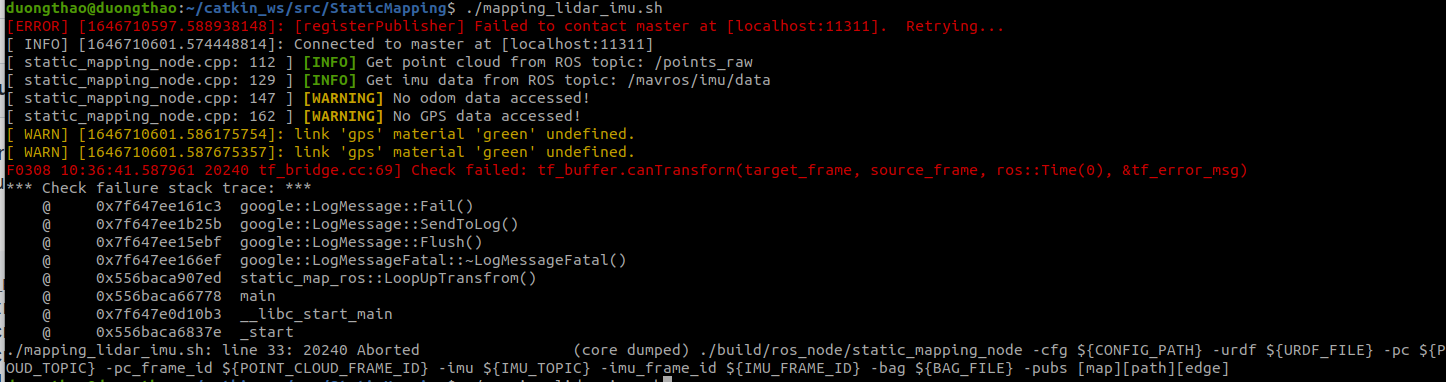
./mapping_lidar_imu.sh, program failed. How can I fix it?