 raultron
commented
6 years ago
raultron
commented
6 years ago These results look really interesting. I would like to see as well the distribution of the condition number, plot the value of the condition number for each pose.
To understand what is happening with the transfer error please give me a link to the code where you are calculating the transfer error.
 EgalYue
EgalYue

























i make simulation for 4 methods: ippe,cv2.SOLVEPNP_DLS, cv2.SOLVEPNP_EPNP, cv2.SOLVEPNP_ITERATIVE
Fix X,Y axis and set Z [0.5,2], i find that as the value of Z increases,the R_error and t_error also increase,it has good relationship with condition number. But the transfer_error seems not good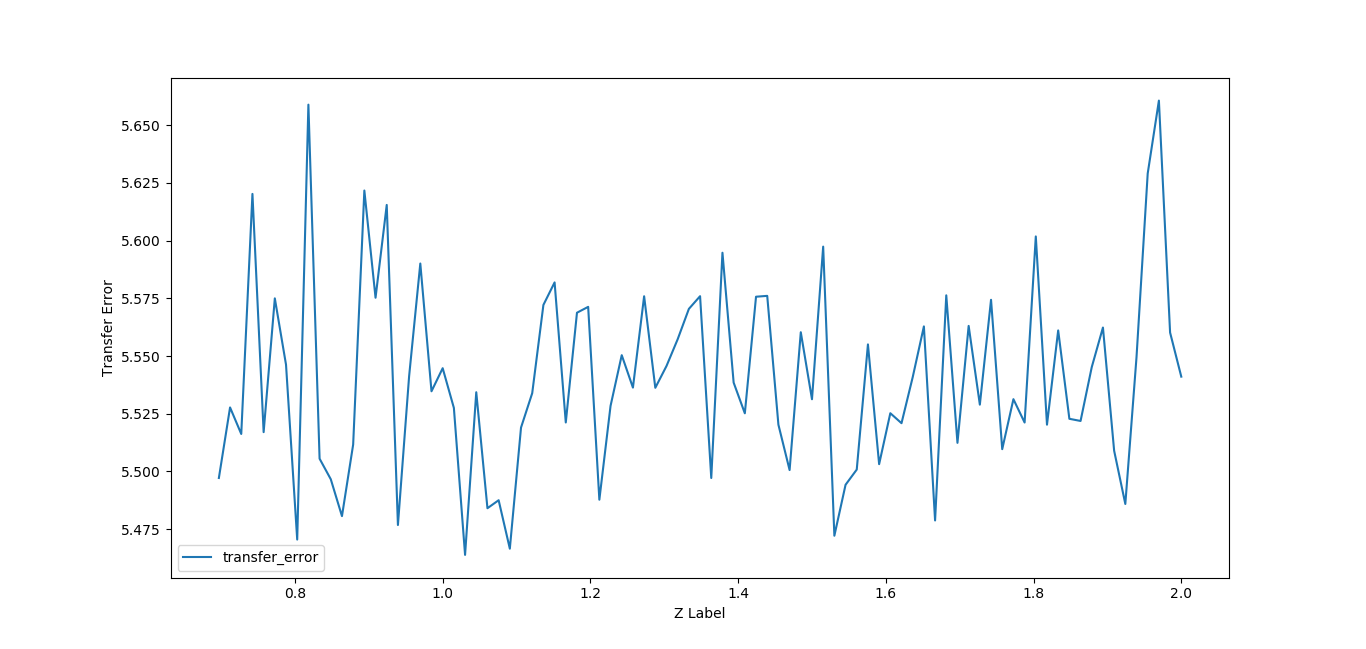
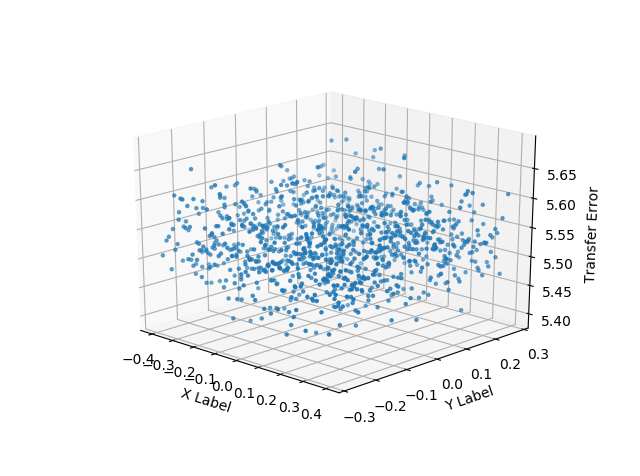
Fix Z axis,X [-0.5,0.5],Y[-0.5,0.5] a). Method: ippe, cv2.SOLVEPNP_ITERATIVE i find that,the R_error and t_error increase in the near of origin (0,0). But the transfer_error seems not good.
b). Method: ippe, cv2.SOLVEPNP_EPNP i find that,the R_error and t_error increase in the near of origin (0,0). But the transfer_error seems not good.
c). Method: ippe, cv2.SOLVEPNP_DLS t_error is almost 0, but R_error seems not good. But the transfer_error seems not good.
===========================================================
So can you give me some Suggest about it???