Open Feng-DDXY opened 1 week ago
使用版本:Ubuntu 16.04 ROS Kinetic(已安装)
机器人系统仿真是通过计算机对实体机器人系统进行模拟
在 ROS 中分别表现为
URDF直译为统一(标准化)机器人描述格式,以 XML 方式描述机器人的部分结构,比如底盘,机械臂以及不同关节的自由度,且XML文件可以被 C++ 内置的解释器转换成可视化的机器人模型,URDF 不能单独使用,需要结合 Rviz或 Gazebo,前面在ROS编程基础(五)中已经安装完Rviz,本篇中直接使用
以下步骤自行完成(仅附终端命令) 1.在已有工作空间下创建功能包my_robot 2.导入urdf和xacro作为该功能包的依赖项
catkin_create_pkg my_robot std_msgs roscpp rospy urdf xacro cd ~/catkin_ws catkin_make source devel/setup.bash //添加环境变量
在my_robot文件夹路径下新建4个文件夹,规范化管理文件:
mkdir urdf meshes config launch
删除文件夹:(放在这万一路径新建错了记得删一下)
rm -r urdf meshes config launch
在urdf文件夹下创建 URDF 文件
cd ./urdf touch test_urdf.urdf
在test_urdf.urdf文件内输入以下内容:
<?xml version="1.0"?> <robot name="red_box"> <link name="base_link"> <visual> <geometry> <box size="1 0.5 0.2"/> <!-- 长方体尺寸 (长宽高) --> </geometry> <material name="red"> <color rgba="1 0 0 1"/> <!-- RGBA 模式 红色 完全不透明--> </material> </visual> <collision> <geometry> <box size="1 0.5 0.2"/> </geometry> </collision> <inertial> <mass value="1.0"/> <!-- 连杆质量 1.0 千克--> <origin xyz="0 0 0"/> <!-- 连杆惯性坐标系的原点位置--> <inertia ixx="0.1" ixy="0" ixz="0" iyy="0.1" iyz="0" izz="0.1"/> <!-- 连杆的惯性矩阵--> </inertial> </link> </robot>
代码解释:
<visual>:定义了机器人的可视化部分
<visual>
<geometry>:指定几何形状,在这里是一个长方体
<geometry>
<collision>:定义机器人与环境发生碰撞时的几何形状。该代码中碰撞体积与可视化部分相同,都是一个尺寸为 1 x 0.5 x 0.2 的长方体
<collision>
1 x 0.5 x 0.2
<inertial>:定义机器人连杆的惯性属性
<inertial>
在两个终端中输入以下命令:(第二行命令要在urdf路径下)
roscore rosparam load test_urdf.urdf /robot_description
可以使用以下命令检测第二行命令是否生效:
rosparam get /robot_description
如果命令输出了 URDF 文件的内容,说明文件已成功加载,如下所示:
在终端中输入以下命令打开rviz
rviz
rviz默认情况下没有添加机器人显示组件,需要手动添加,如下操作:
/robot_description
但是图中是白色的长方形,是因为Global Options里面的Fixed Frame默认值是map,通常用于机器人在地图中的定位和路径规划,将该参数修改成base_link,直接显示与 base_link 相关的模型数据
如下所示:
将刚刚的urdf文件进行修改,替换成以下代码:
<?xml version="1.0"?> <robot name="mycar"> <link name="base_link"> <visual> <geometry> <box size="0.5 0.2 0.1" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="blue"> <color rgba="0 0 1.0 0.5" /> </material> </visual> </link> <link name="camera"> <visual> <geometry> <box size="0.02 0.05 0.05" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="red"> <color rgba="1 0 0 0.5" /> </material> </visual> </link> <joint name="camera2baselink" type="continuous"> <parent link="base_link"/> <child link="camera" /> <origin xyz="0.25 0 0.075" rpy="0 0 0" /> <axis xyz="0 0 1" /> </joint> </robot>
代码解释:
底盘 (base_link) 是机器人的主要框架,形状为一个矩形盒子,表示机器人的车身
base_link
摄像头 (camera) 小矩形盒子,0.02 米 x 0.05 米 x 0.05 米
camera
关节 (camera2baselink) 通过 joint 标签将摄像头连接到底盘,通过一个continuous旋转关节来在整个范围内允许旋转
camera2baselink
link 定义机器人组件的基本元素,每个 link 都可以包含视觉、碰撞和物理属性
link
<origin xyz="0 0 0" rpy="0 0 0" /> 位置相对于自身链接的原点,且没有旋转
<origin xyz="0 0 0" rpy="0 0 0" />
origin xyz="0.25 0 0.1" 表示该关节的位置。也就是说,摄像头相对于底盘的位置是在 x 轴方向偏移 0.25 米,z 轴方向偏移 0.1 米
origin xyz="0.25 0 0.1"
axis xyz="0 0 1" 定义了关节旋转的轴,这里表示关节沿 z 轴(垂直方向)旋转
axis xyz="0 0 1"
修改代码后在终端中输入以下命令将 URDF 文件载入到 ROS 参数服务器 (要在roscore开着的情况下)
rosparam load test_urdf.urdf /robot_description
进入 launch 文件夹创建launch脚本:
cd ~/catkin_ws/src/my_robot/launch gedit robot_launch.launch
在launch文件中编写以下内容:
<launch> <!-- 加载 URDF 文件到参数服务器 --> <param name="robot_description" textfile="$(find my_robot)/urdf/test_urdf.urdf" /> <!-- 启动 RViz,加载自定义配置文件 --> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find my_robot)/config/robot_config.rviz" /> <!-- 启动关节状态发布器 --> <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> <!-- 启动机器人状态发布器 --> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /> <!-- 可选: 启动 GUI 控制关节状态发布的节点 --> <node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /> </launch>
joint_state_publisher_gui
我的环境直接运行以上代码的时候会遇到报错:[ERROR] [1584370263.037038]: Could not find the GUI, install the 'joint_state_publisher_gui' package
原因是joint_state_publisher_gui 包没有安装,输入以下命令进行安装即可:
sudo apt-get install ros-kinetic-joint-state-publisher-gui
通过文件的绝对路径运行launch命令:
roslaunch ~/catkin_ws/src/my_robot/launch/robot_launch.launch
因为我通过功能包 运行失败,不知道为什么,失败代码也在这里放出来:
roslaunch my_robot launch/robot_launch.launch
这里省去刚刚导入RobotModel和修改Fixed Frame的步骤,自行完成
可以转动joint_state的滑条看红色摄像头疯狂旋转
效果如下:
重复启动launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行导入的操作,为了方便使用,可以使用如下方式优化:
launch
首先,将当前配置保存进config目录
config
然后,launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径
args
-d 配置文件路径
<launch> <param name="robot_description" textfile="$(find 包名)/urdf/urdf/urdf01_HelloWorld.urdf" /> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find 报名)/config/rviz/show_mycar.rviz" /> </launch>
再启动时,就可以包含之前的组件配置了,使用更方便快捷。
本篇在ROS建模仿真(一)的基础上,请确保已经完成之前步骤
在test_urdf.urdf文件内输入以下内容:(这里沿用上一篇的文件,只修改代码)
<?xml version="1.0"?> <robot name="mycar"> <link name="base_footprint"> <visual> <geometry> <sphere radius="0.001" /> </geometry> </visual> </link> <link name="base_link"> <visual> <geometry> <cylinder radius="0.1" length="0.08" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="yellow"> <color rgba="0.8 0.3 0.1 0.5" /> </material> </visual> </link> <joint name="base_link2base_footprint" type="fixed"> <parent link="base_footprint" /> <child link="base_link"/> <origin xyz="0 0 0.055" /> </joint> <link name="left_wheel"> <visual> <geometry> <cylinder radius="0.0325" length="0.015" /> </geometry> <origin xyz="0 0 0" rpy="1.5705 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> </material> </visual> </link> <joint name="left_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="left_wheel" /> <origin xyz="0 0.1 -0.0225" /> <axis xyz="0 1 0" /> </joint> <link name="right_wheel"> <visual> <geometry> <cylinder radius="0.0325" length="0.015" /> </geometry> <origin xyz="0 0 0" rpy="1.5705 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> </material> </visual> </link> <joint name="right_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="right_wheel" /> <origin xyz="0 -0.1 -0.0225" /> <axis xyz="0 1 0" /> </joint> <link name="front_wheel"> <visual> <geometry> <sphere radius="0.0075" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> </material> </visual> </link> <joint name="front_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="front_wheel" /> <origin xyz="0.0925 0 -0.0475" /> <axis xyz="1 1 1" /> </joint> <link name="back_wheel"> <visual> <geometry> <sphere radius="0.0075" /> </geometry> <origin xyz="0 0 0" rpy="0 0 0" /> <material name="black"> <color rgba="0.0 0.0 0.0 1.0" /> </material> </visual> </link> <joint name="back_wheel2base_link" type="continuous"> <parent link="base_link" /> <child link="back_wheel" /> <origin xyz="-0.0925 0 -0.0475" /> <axis xyz="1 1 1" /> </joint> </robot>
进入 launch 文件夹修改launch脚本内容:
<launch> <!-- 将 urdf 文件内容设置进参数服务器 --> <param name="robot_description" textfile="$(find my_robot)/urdf/test_urdf.urdf" /> <!-- 启动 rviz --> <node pkg="rviz" type="rviz" name="rviz_test" args="-d $(find my_robot)/config/helloworld.rviz" /> <!-- 启动机器人状态和关节状态发布节点 --> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /> <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> <!-- 启动图形化的控制关节运动节点 --> <node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /> </launch>
Arbotix:Arbotix 是一款控制电机、舵机的控制板,并提供相应的 ros 功能包。该功能包不仅可以驱动真实的 Arbotix 控制板,它还提供一个差速控制器,通过接受速度控制指令更新机器人的 joint 状态,从而帮助我们实现机器人在 rviz 中的运动。
sudo apt-get install ros-kinetic-arbotix
进入config 文件夹创建一个 YAML 文件:arbotix_controllers.yaml
cd ~/catkin_ws/src/my_robot/config gedit arbotix_controllers.yaml
在yaml文件中编写以下内容:
# 该文件是控制器配置,一个机器人模型可能有多个控制器,比如: 底盘、机械臂、夹持器(机械手).... # 因此,根 name 是 controller controllers: { # 单控制器设置 base_controller: { #类型: 差速控制器 type: diff_controller, #参考坐标 base_frame_id: base_footprint, #两个轮子之间的间距 base_width: 0.2, #控制频率 ticks_meter: 2000, #PID控制参数,使机器人车轮快速达到预期速度 Kp: 12, Kd: 12, Ki: 0, Ko: 50, #加速限制 accel_limit: 1.0 } }
将之前的launch修改成以下内容:
即在launch 文件中配置 arbotix 节点
<launch> <!-- 将 urdf 文件内容设置进参数服务器 --> <param name="robot_description" textfile="$(find my_robot)/urdf/test_urdf.urdf" /> <!-- 启动 rviz --> <node pkg="rviz" type="rviz" name="rviz_test" args="-d $(find my_robot)/config/helloworld.rviz" /> <!-- 启动机器人状态和关节状态发布节点 --> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher" /> <node pkg="joint_state_publisher" type="joint_state_publisher" name="joint_state_publisher" /> <!-- 启动图形化的控制关节运动节点 --> <node pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" name="joint_state_publisher_gui" /> <!-- 添加 arbotix 节点,加载配置文件并设置参数 --> <node name="arbotix" pkg="arbotix_python" type="arbotix_driver" output="screen"> <!-- 加载配置文件 --> <rosparam file="$(find my_robot)/config/arbotix_controllers.yaml" command="load" /> <!-- 设置模拟模式参数 --> <param name="sim" value="true" /> </node> </launch>
使用版本:Ubuntu 16.04 ROS Kinetic(已安装)
机器人系统仿真是通过计算机对实体机器人系统进行模拟
在 ROS 中分别表现为
URDF直译为统一(标准化)机器人描述格式,以 XML 方式描述机器人的部分结构,比如底盘,机械臂以及不同关节的自由度,且XML文件可以被 C++ 内置的解释器转换成可视化的机器人模型,URDF 不能单独使用,需要结合 Rviz或 Gazebo,前面在ROS编程基础(五)中已经安装完Rviz,本篇中直接使用
使用URDF创建长方体机器人模型
在my_robot文件夹路径下新建4个文件夹,规范化管理文件:
删除文件夹:(放在这万一路径新建错了记得删一下)
编写URDF文件
在urdf文件夹下创建 URDF 文件
在test_urdf.urdf文件内输入以下内容:
代码解释:
<visual>:定义了机器人的可视化部分<geometry>:指定几何形状,在这里是一个长方体<collision>:定义机器人与环境发生碰撞时的几何形状。该代码中碰撞体积与可视化部分相同,都是一个尺寸为1 x 0.5 x 0.2的长方体<inertial>:定义机器人连杆的惯性属性加载URDF文件到参数服务器
在两个终端中输入以下命令:(第二行命令要在urdf路径下)
可以使用以下命令检测第二行命令是否生效:
如果命令输出了 URDF 文件的内容,说明文件已成功加载,如下所示:
在 Rviz 中显示机器人模型
在终端中输入以下命令打开rviz
rviz默认情况下没有添加机器人显示组件,需要手动添加,如下操作:
/robot_description但是图中是白色的长方形,是因为Global Options里面的Fixed Frame默认值是map,通常用于机器人在地图中的定位和路径规划,将该参数修改成base_link,直接显示与 base_link 相关的模型数据
如下所示:
在长方形机器人模型前加摄像头,并使用launch文件加载
将刚刚的urdf文件进行修改,替换成以下代码:
代码解释:
底盘 (
base_link) 是机器人的主要框架,形状为一个矩形盒子,表示机器人的车身摄像头 (
camera) 小矩形盒子,0.02 米 x 0.05 米 x 0.05 米关节 (
camera2baselink) 通过 joint 标签将摄像头连接到底盘,通过一个continuous旋转关节来在整个范围内允许旋转link定义机器人组件的基本元素,每个link都可以包含视觉、碰撞和物理属性<origin xyz="0 0 0" rpy="0 0 0" />位置相对于自身链接的原点,且没有旋转origin xyz="0.25 0 0.1"表示该关节的位置。也就是说,摄像头相对于底盘的位置是在 x 轴方向偏移 0.25 米,z 轴方向偏移 0.1 米axis xyz="0 0 1"定义了关节旋转的轴,这里表示关节沿 z 轴(垂直方向)旋转修改代码后在终端中输入以下命令将 URDF 文件载入到 ROS 参数服务器 (要在roscore开着的情况下)
进入 launch 文件夹创建launch脚本:
在launch文件中编写以下内容:
安装
joint_state_publisher_gui包我的环境直接运行以上代码的时候会遇到报错:[ERROR] [1584370263.037038]: Could not find the GUI, install the 'joint_state_publisher_gui' package
原因是
joint_state_publisher_gui包没有安装,输入以下命令进行安装即可:运行launch节点
通过文件的绝对路径运行launch命令:
因为我通过功能包 运行失败,不知道为什么,失败代码也在这里放出来:
这里省去刚刚导入RobotModel和修改Fixed Frame的步骤,自行完成
可以转动joint_state的滑条看红色摄像头疯狂旋转
效果如下: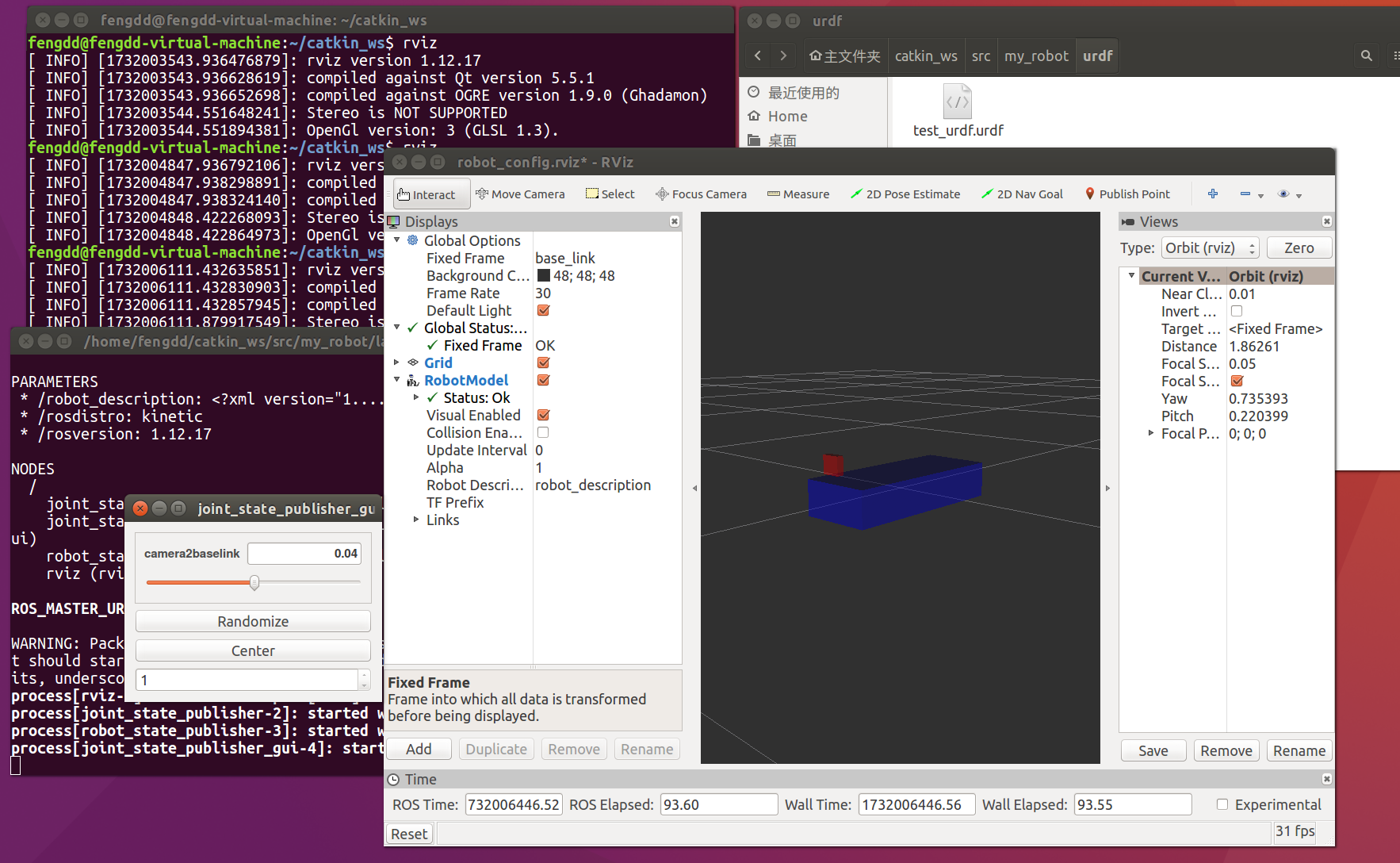
优化 rviz 启动(这个操作我没有试)
重复启动
launch文件时,Rviz 之前的组件配置信息不会自动保存,需要重复执行导入的操作,为了方便使用,可以使用如下方式优化:首先,将当前配置保存进
config目录然后,
launch文件中 Rviz 的启动配置添加参数:args,值设置为-d 配置文件路径再启动时,就可以包含之前的组件配置了,使用更方便快捷。
使用URDF创建小车底盘模型
本篇在ROS建模仿真(一)的基础上,请确保已经完成之前步骤
编写URDF文件
在test_urdf.urdf文件内输入以下内容:(这里沿用上一篇的文件,只修改代码)
修改代码后在终端中输入以下命令将 URDF 文件载入到 ROS 参数服务器 (要在roscore开着的情况下)
进入 launch 文件夹修改launch脚本内容:
在launch文件中编写以下内容:
通过文件的绝对路径运行launch命令:
效果如下:
使用Arbotix发布话题控制小车移动
Arbotix:Arbotix 是一款控制电机、舵机的控制板,并提供相应的 ros 功能包。该功能包不仅可以驱动真实的 Arbotix 控制板,它还提供一个差速控制器,通过接受速度控制指令更新机器人的 joint 状态,从而帮助我们实现机器人在 rviz 中的运动。
安装 Arbotix
添加 arbotix 所需的配置文件
进入config 文件夹创建一个 YAML 文件:arbotix_controllers.yaml
在yaml文件中编写以下内容:
将之前的launch修改成以下内容:
即在launch 文件中配置 arbotix 节点
代码解释: