GuiRitter
commented
4 years ago
GuiRitter
commented
4 years ago Hi there.
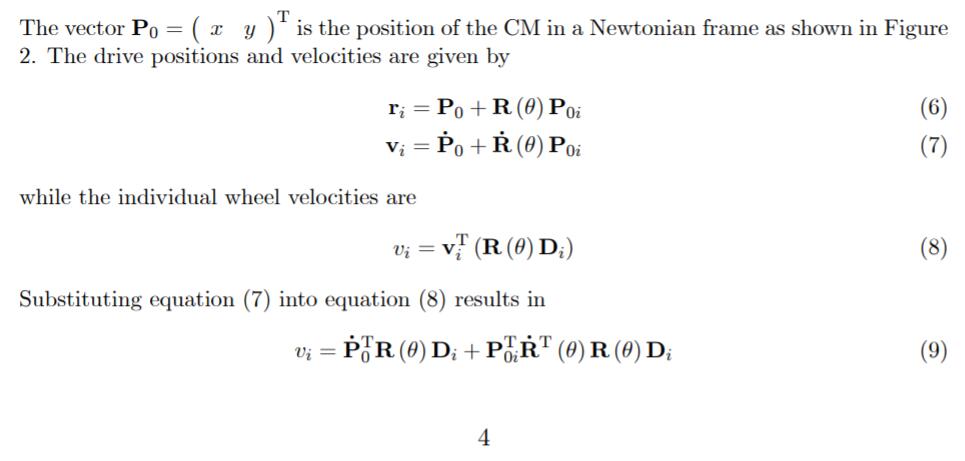
About the first question, about equation (8), unfortunately I'm not familiar with it. Upon inspection, it seems that it multiplies by R(θ) again because it starts with Di, which is a unit vector placed in the same position of the wheels and pointing to where the wheels move towards to. Because it's located in the wheels' default position, it needs to be multiplied by R(θ) in order to move to the position where the wheels are at after the frame rotates. Then it's multiplied by vi^T. I don't know why it's transposed, but that causes it to result in a scalar, which must be the purpose, just a number indicating the velocity.
As for the second question, I didn't understand it either.
To be of some help, I would suggest you study different papers. Basically every author uses different conventions to write about kinematics and some are easier to understand than others. I think these would be better:
Li, Xiang & Zell, Andreas. (2007). Motion Control of an Omnidirectional Mobile Robot. 24. 125-132. 10.1007/978-3-540-85640-5_14.
Feng, L. & Everett, Bart & Borenstein, J.. (2006). Where am I? : sensors and methods for autonomous mobile robot positioning. (page 26)
Gonçalves, José & Lima, José & Costa, Paulo. (2008). Real Time Tracking of an Omnidirectional Robot - An Extended Kalman Filter Approach.. 5-10.
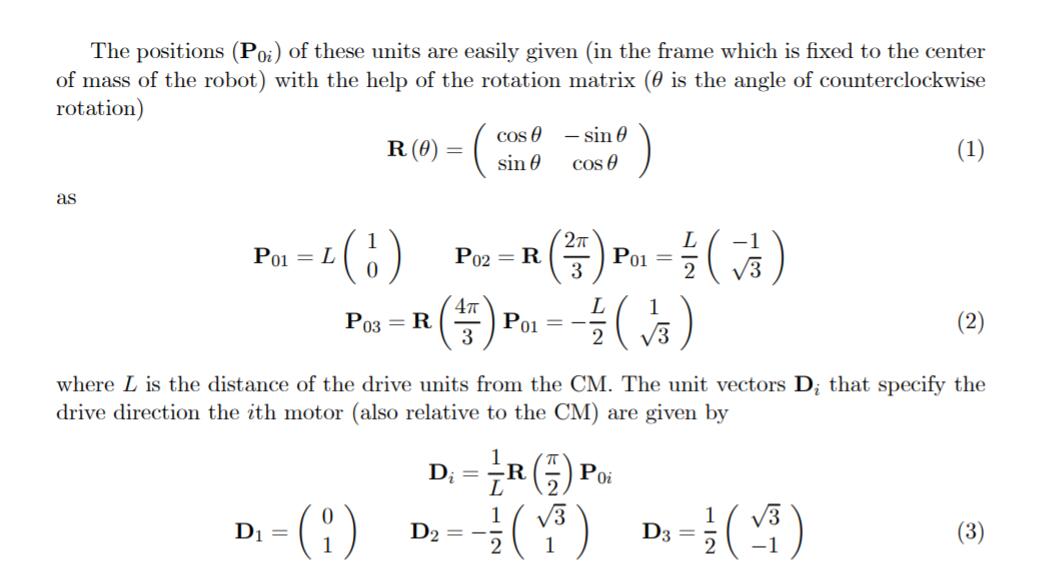
Hi, I tried to understand kinematics after I found your project here. Some problems stop me to go further. Here I upload some contents of different papers talking about kinematics. For the 1st three pictures, I don't know how equation (8) is from and I am little confused about translational and tangentianal velocities. I don't know why it mutiplys R(theta) again in equation (8).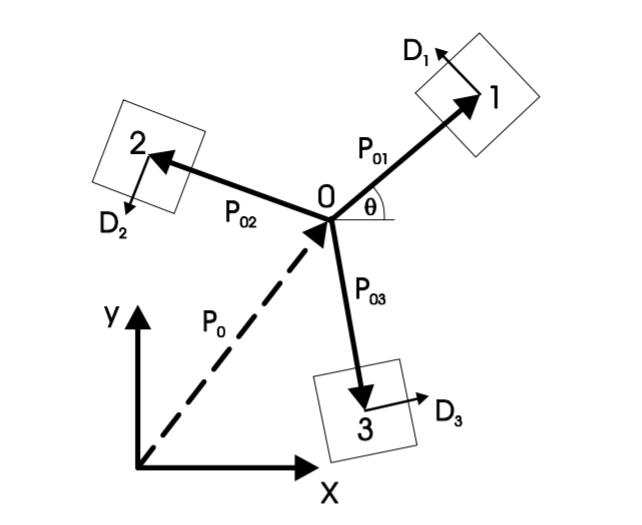
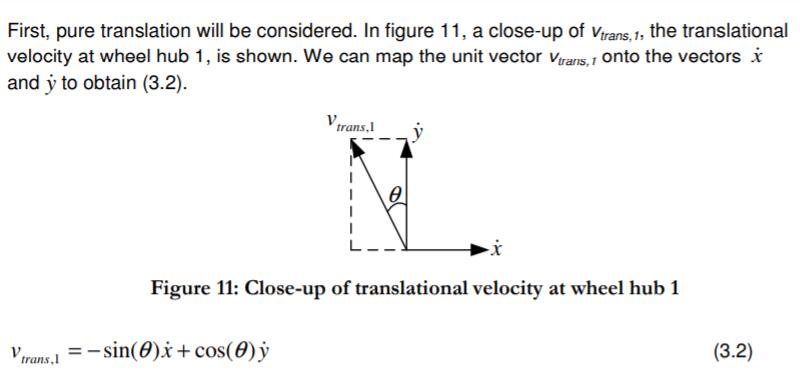
For the 2nd paper, I cannot obtain the equation of v_trans,i. Also, I am not sure if the rotation matrix in this case is R(theta) = [cos(theta) -sin(theta); sin(theta) cos(theta)]. Can you please tell some details about the kinematics.