 PeiliangLi
commented
7 years ago
PeiliangLi
commented
7 years ago In our code, pre_integration connects the current frame and the previous frame. So the first frame doesn't need to have pre_integration term.
Closed vonzy closed 7 years ago
PeiliangLi
commented
7 years ago In our code, pre_integration connects the current frame and the previous frame. So the first frame doesn't need to have pre_integration term.
 vonzy
commented
7 years ago
vonzy
commented
7 years ago holyshit.... when I debug the program, I found a member points to released resource, I thought it was a bug... okay, you are right!
In vins.cpp, the following code segment seems trying to release pre_integrations between all_image_frame.begin() and it_0.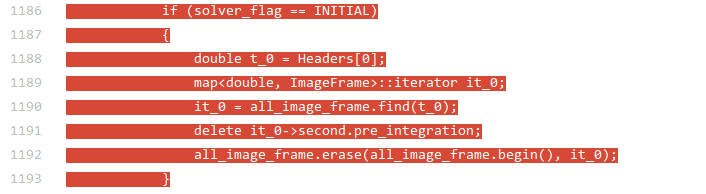
but actually 'all_image_frame.erase(all_image_frame.begin(), it_0);' will remove all ImageFrame from all_image_frame.begin() to it_0, with it_0 not being removed. Then 'delete it_0->second.pre_integration;' will make the first ImageFrame of all_image_frame have a pre_integration member which have been released.
So the right code might be