 GONGXI1994
commented
6 years ago
GONGXI1994
commented
6 years ago 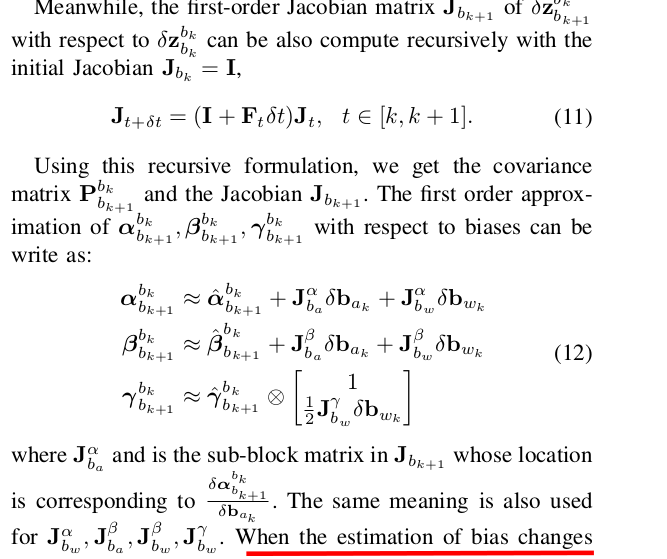
Open GONGXI1994 opened 6 years ago
GONGXI1994
commented
6 years ago
GONGXI1994
commented
6 years ago Foster give the full derivation of the Jacobians, however your paper seems different from what he has done, and It would be very kind if you provide the reason why you can simply get the Jacobian from the F...... @shaojie @dvorak0 @WayneTimer @groundmelon @xuhao1
 qintonguav
commented
6 years ago
qintonguav
commented
6 years ago Calculate F is tough. Jacobian is directly part of F, even in Foster's formulation.
GONGXI1994
commented
6 years ago I konw the F is constructed by the jaccobians ,but I do not think the "error state " jaccobian is the same jaccobian that used to correct the preIntegration when the bias change...... @qintonguav
 gavinfan1
commented
6 years ago
gavinfan1
commented
6 years ago I also can not understand the Jaccobian here. Can you give more information about the jaccobian ? I can not find the Foster's formulation. Can you give me the network link? @qintonguav @GONGXI1994
GONGXI1994
commented
6 years ago paper: On-Manifold Preintegration for Real-Time Visual-Inertial Odometry
 struggleforbetter
commented
5 years ago
struggleforbetter
commented
5 years ago I'm also puzzled with this problem.The jaccobian should be the measurement change with the bias change. Why is it this? Are the two Jaccobians same ?
 lywcn
commented
4 years ago
lywcn
commented
4 years ago I am also confused here. any updates?