 yangfanFred
commented
1 year ago
yangfanFred
commented
1 year ago Hi Danijel,
uncomment print flag in main.c to enable output point info

Closed danijel-fmci closed 1 year ago
yangfanFred
commented
1 year ago Hi Danijel,
uncomment print flag in main.c to enable output point info
 danijel-fmci
commented
1 year ago
danijel-fmci
commented
1 year ago Hi @yangfanFred
Now it outputs the timestamp and corresponding point size in the terminal. Thank you very much.
Best, Danijel

Hi,
I followed the steps from README.md, but after the build with
catkin_make -DCMAKE_BUILD_TYPE=Releasethere is no install folder. Please take a look at the attached command history. HesaiLidar_General_ROS_terminal_commands_history.txtHowever, I found another tutorial on YT on Hesai Lidar Tutorial #3: Run ROS Driver with Connected Lidar and after executing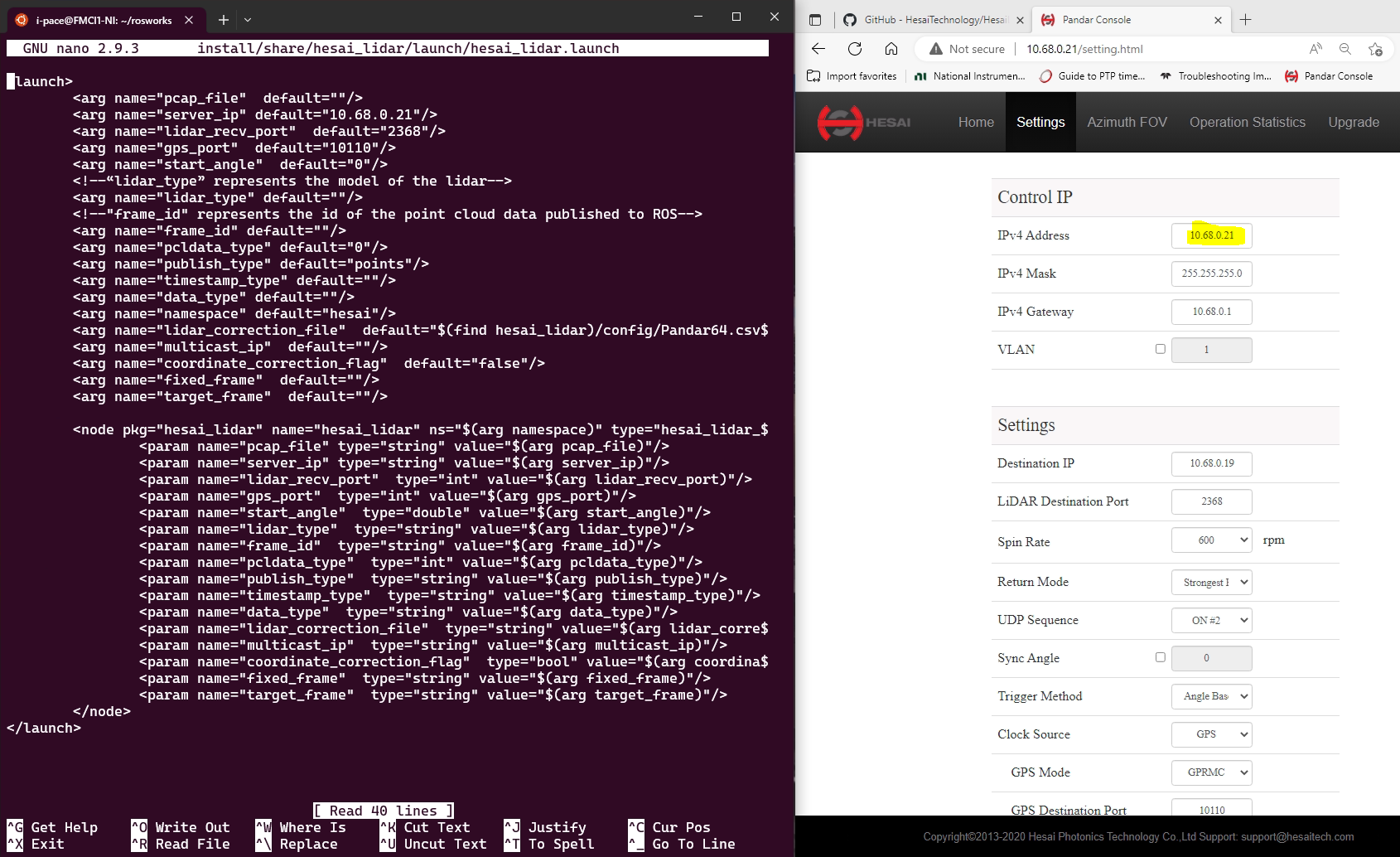
catkin build --force-cmakeI got install folder. But still do not get the timestamp and point size in terminal output as per YT tutorial. Please see attached command history: [Youtube ]- Hesai Lidar Tutorial #3 Run ROS Driver with Connected Lidar_terminal_commands_history.txtThe lidar is working properly using Pandar.exe.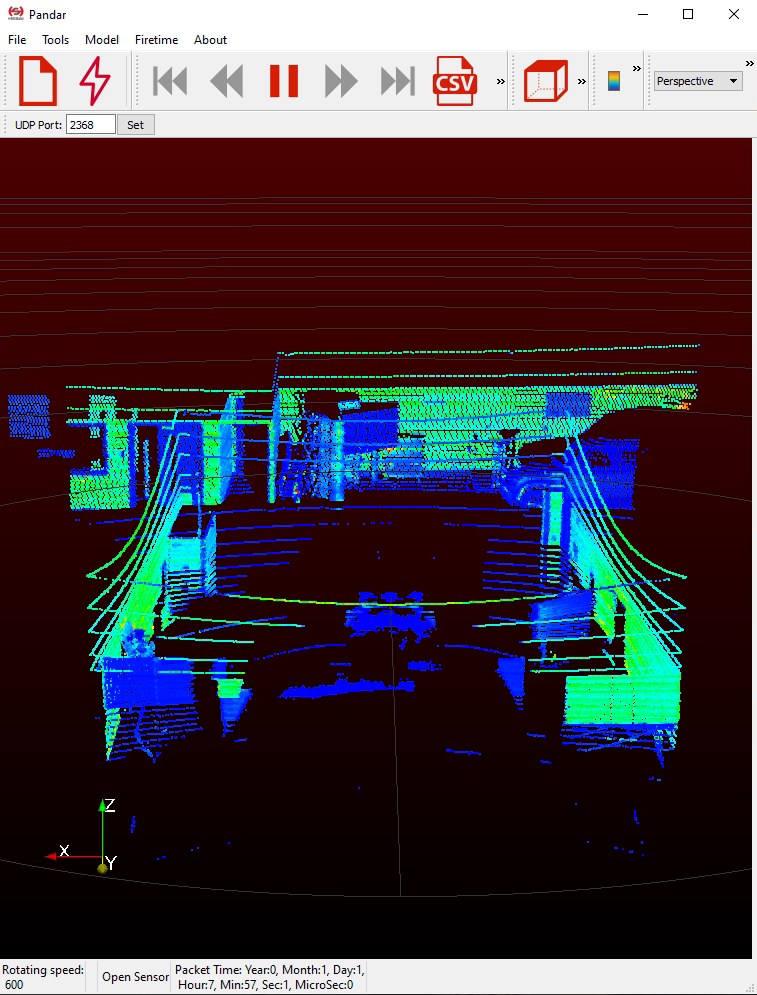
The host OS is Windows 10, installed WSL1 and Ubuntu 18.04 with ROS melodic. host_spec.txt
Thank you.
Best, Danijel