 boonflies
commented
6 years ago
boonflies
commented
6 years ago I am experiencing the same thing. The drone does not move. Could it be because of using tum_ardrone in joystick mode earlier. There seems to be some issue changing to autopilot. I tried to switch to autopilot after initially using joystick mode but drone does not even respond to takeoff command in autopilot mode.
 axelfar
axelfar And I want this result :
And I want this result :
 In the last photo I have fix manually the different parameters. But when I generate a path my program didn't have a good estimation of distances.
In conversion.cpp you do a matrix rotation of 45°? why not 90°?
In the last photo I have fix manually the different parameters. But when I generate a path my program didn't have a good estimation of distances.
In conversion.cpp you do a matrix rotation of 45°? why not 90°? TengFeiHan0
TengFeiHan0 here is my rqt_graph. I promise I typed your instructions step by step. So I don't know how to fix this problem.
here is my rqt_graph. I promise I typed your instructions step by step. So I don't know how to fix this problem. kungfrank
kungfrank after a calibration of my drone, I tried to start mapping thread as displayed in the image, it said that the tracking has been lost. I retried several times. Unfortunately, the output is always the same with what I have said before. Do you know the reason?
after a calibration of my drone, I tried to start mapping thread as displayed in the image, it said that the tracking has been lost. I retried several times. Unfortunately, the output is always the same with what I have said before. Do you know the reason?
Hi all,
I have download and edit octomap_server to made my own octomap generation like this : With three types of voxels(Occupied, free and unknown).
I use Octomap.launch , the same as in _ar_dronemoveit folder but in the _octomapserver folder.
With three types of voxels(Occupied, free and unknown).
I use Octomap.launch , the same as in _ar_dronemoveit folder but in the _octomapserver folder.
Now I want to use moveit to planify a path with my drone. But when I use Demo.launch I have the default octomap generation like this :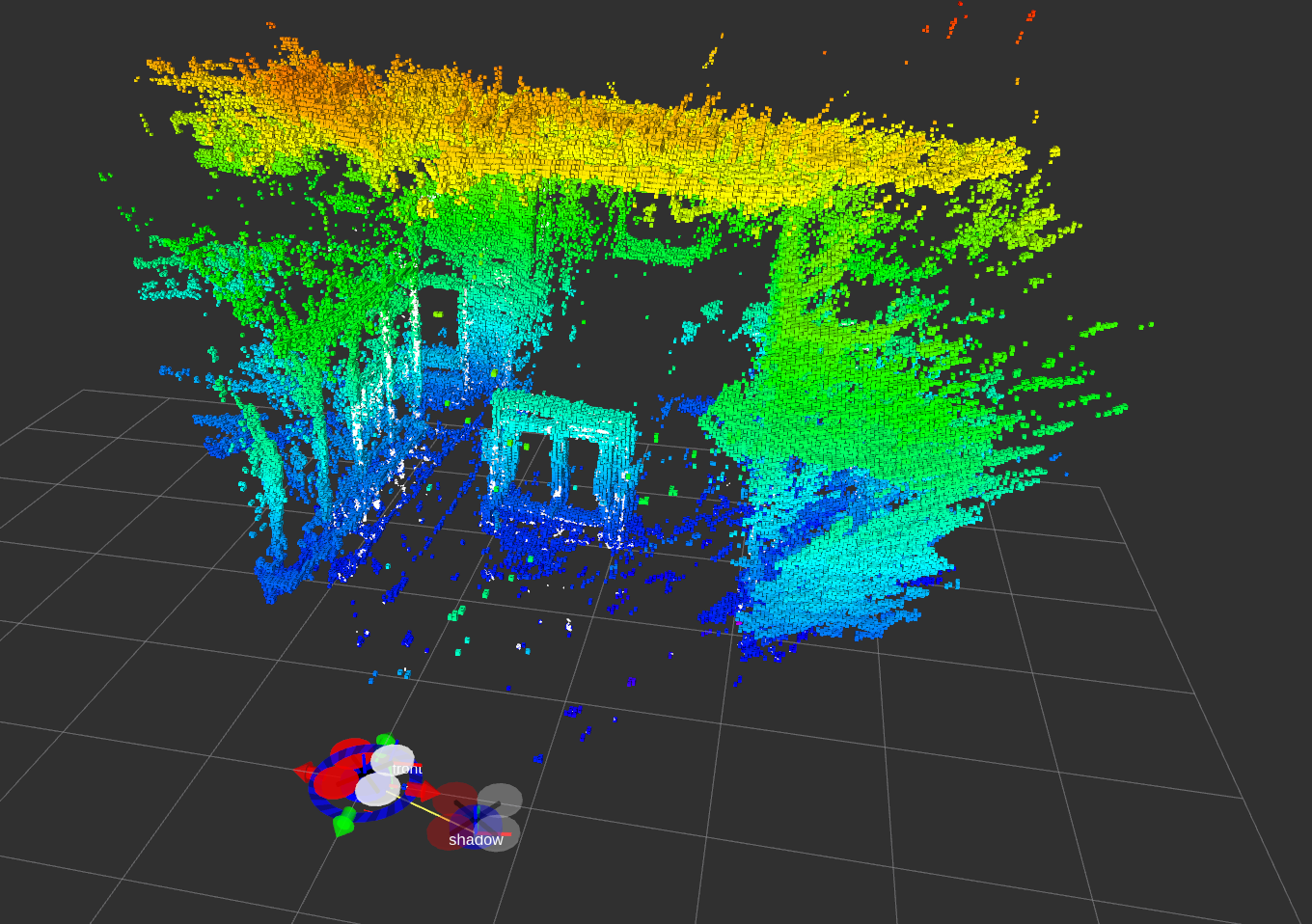
Do you know how change the octomap generation by my version?
In a second time when I try to planify a path, I have this error : "No Planning Library Loaded"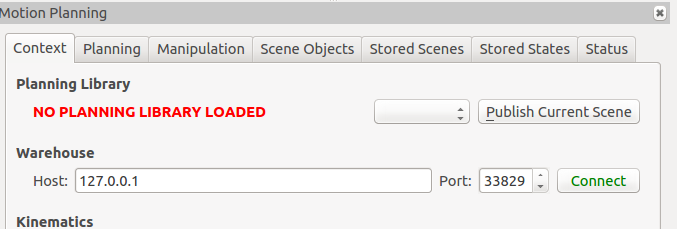
And if I click on 'Plan' it failed immediately. Someone see the cause of this problem?
EDIT: After some updates and packages installation, my problem with the planning library is solved! I can plan a path and visualize it in RVIZ. Thx