 marcoesposito1988
commented
3 years ago
marcoesposito1988
commented
3 years ago Hello @aoligeihahah,
the sampler crashed, because the tf frame camera_marker that is configured in your launch file as the marker frame doesn't exist. You will have to change that parameter for your particular setup.
Since you are calibrating a kinect, I guess that you are using an AR marker tracking library, like ArUco. That library should publish the pose of the marker in tf, as a transform from the camera to the marker. You will have to insert the tf frame of the marker as your tracking_marker frame when you include or launch easy_handeye/calibrate.launch
 aoligeihahah
aoligeihahah
 lyh458
lyh458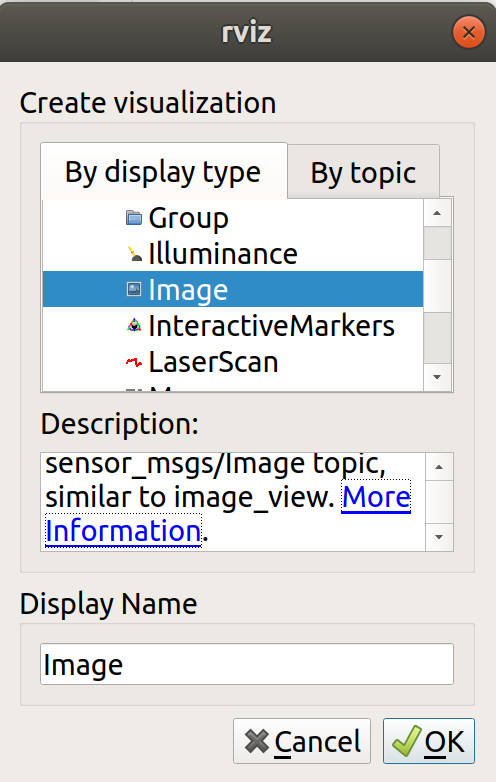 Another way is run
Another way is run 

 I want to turn on rqt easy In the handeye menu bar, select plugins - visualization - image view. Do you have any good methods?
I want to turn on rqt easy In the handeye menu bar, select plugins - visualization - image view. Do you have any good methods? How do I get the pose of publishing tags in TF and how to use TF frame that must be inserted into tag as framework easy_ handeye/ calibrate.launch ? Can you write an example for me
How do I get the pose of publishing tags in TF and how to use TF frame that must be inserted into tag as framework easy_ handeye/ calibrate.launch ? Can you write an example for me wyf2015fei
wyf2015fei zhangtianren
zhangtianren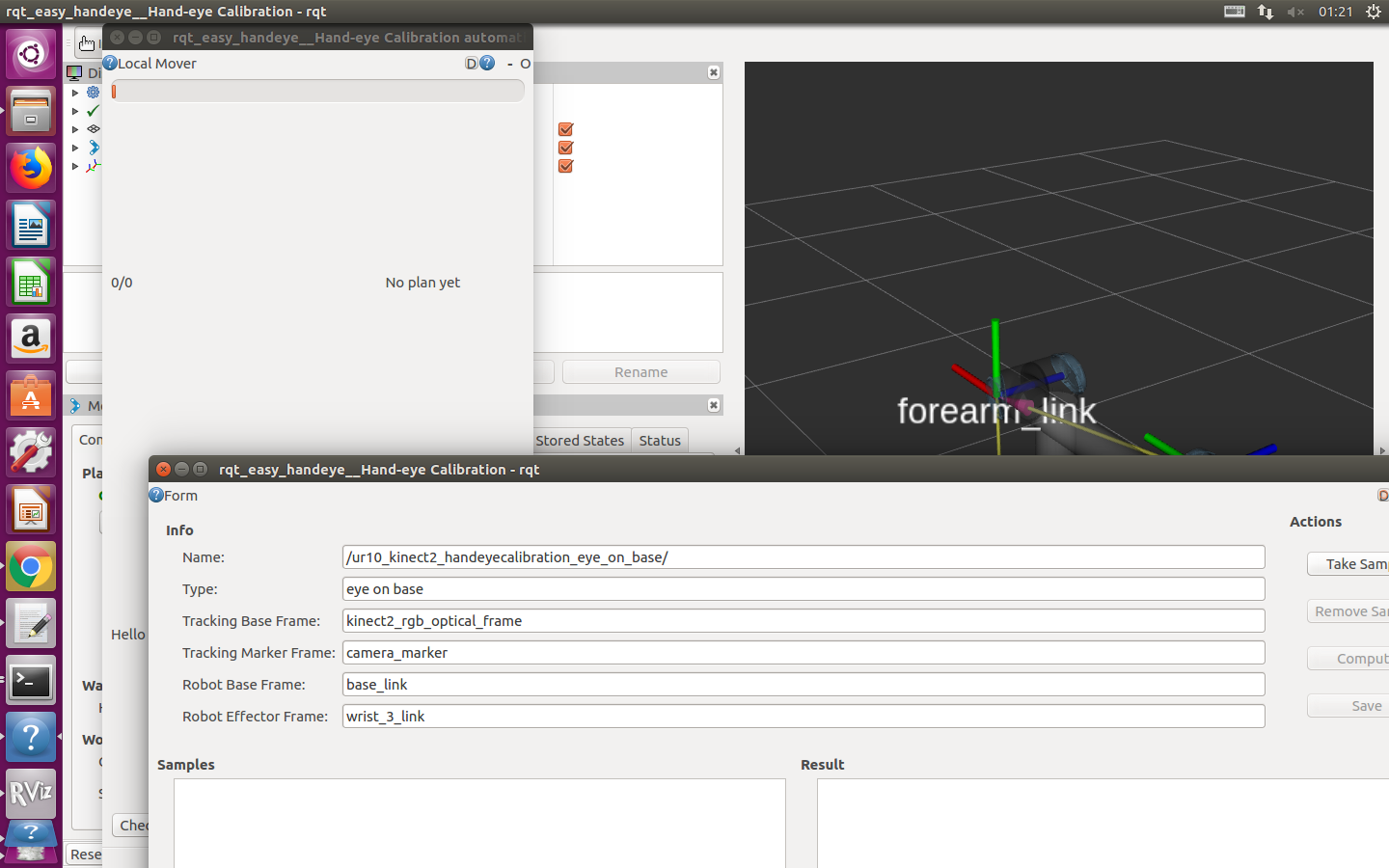
 a2824256
a2824256 si1mari11ion
si1mari11ion
Error processing request: "camera_marker" passed to lookupTransform argument source_frame does not exist. ['Traceback (most recent call last):\n', ' File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 625, in _handle_request\n response = convert_return_to_response(self.handler(request), self.response_class)\n', ' File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_server.py", line 61, in take_sample\n self.sampler.take_sample()\n', ' File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_sampler.py", line 88, in take_sample\n transforms = self._get_transforms()\n', ' File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_sampler.py", line 78, in _get_transforms\n Duration(10))\n', ' File "/opt/ros/kinetic/lib/python2.7/dist-packages/tf2_ros/buffer.py", line 87, in lookup_transform\n return self.lookup_transform_core(target_frame, source_frame, time)\n', 'LookupException: "camera_marker" passed to lookupTransform argument source_frame does not exist. \n'] Traceback (most recent call last): File "/home/he/catkin_ws/src/easy_handeye/rqt_easy_handeye/src/rqt_easy_handeye/rqt_easy_handeye.py", line 118, in handle_take_sample sample_list = self.client.take_sample() File "/home/he/catkin_ws/src/easy_handeye/easy_handeye/src/easy_handeye/handeye_client.py", line 69, in take_sample return self.take_sample_proxy().samples File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 435, in call return self.call(*args, *kwds) File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 515, in call responses = transport.receive_once() File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_base.py", line 728, in receive_once p.read_messages(b, msg_queue, sock) File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 353, in read_messages self._read_ok_byte(b, sock) File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/impl/tcpros_service.py", line 336, in _read_ok_byte raise ServiceException("service [%s] responded with an error: %s"%(self.resolved_name, str)) rospy.service.ServiceException: service [/ur10_kinect2_handeyecalibration_eye_on_base/take_sample] responded with an error: error processing request: "camera_marker" passed to lookupTransform argument source_frame does not exist. [ur10_kinect2_handeyecalibration_eye_on_base/namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt-17] process has died [pid 17692, exit code 1, cmd /home/he/catkin_ws/src/easy_handeye/rqt_easy_handeye/scripts/rqt_easy_handeye name:=namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt log:=/home/he/.ros/log/15dc51b4-33f6-11eb-8f33-484d7ea54583/ur10_kinect2_handeyecalibration_eye_on_base-namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt-17.log]. log file: /home/he/.ros/log/15dc51b4-33f6-11eb-8f33-484d7ea54583/ur10_kinect2_handeyecalibration_eye_on_base-namespace_he_OptiPlex_5040_17632_2104357553874637777_rqt-17.log