 MartyG-RealSense
commented
4 years ago
MartyG-RealSense
commented
4 years ago Hi @anguyen216 Rather than calculating the end of the bag based on length and FPS, a more accurate method to prevent the bag from looping back to the start after it reaches the final frame may be to add a repeat_playback=False condition:
cfg.enable_device_from_file(filename, repeat_playback=False)
Could you test please whether there is a positive difference to the number of frames extracted when using the above command?
 anguyen216
anguyen216 rajkundu
rajkundu Esperer105
Esperer105
Issue Description
I observed an issue with inconsistent frame queue when pulling frames from recorded bag file. I'm looping through all frames from a bag file; at each frame, I align the depth and color frames (either depth --> color or color --> depth), and then save both frames into image files for visual inspection. To stop the loop, I determine the number of frames by using the following function that I wrote. The function simple extracts the length of the video (in second) and then multiplies the length with 30 (fps) to get the number of frames in the file
Function to align frames
I have two different approaches when it comes to aligning the frames and saving them. One is that I align frames as I loop through the frames set. The other is that I loop through the frames set, keep each composite frame and save them somewhere, and then align the frames in another loop after closing the pipeline. Please see the code snippet below for more details. The strange thing is, depends on my approach, the frames extraction result would be very different to each other and when compare to the playback in intel realsense viewer application. All approaches agree upon the length of the video. However, neither made it to the end of the video (when compare to the viewer application display)
First approach: align as looping through the frames
Second approach: loop through the bag file and save composite frames. Align frames after closing the pipeline
Result of first approach: last frame extracted and aligned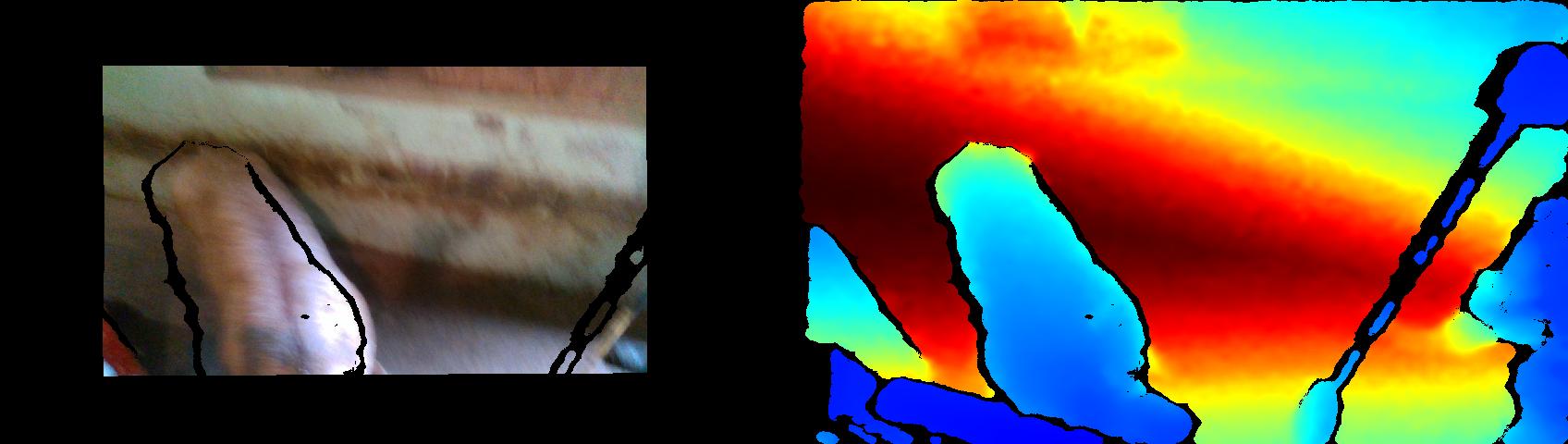
Result of second approach: last frame extracted and aligned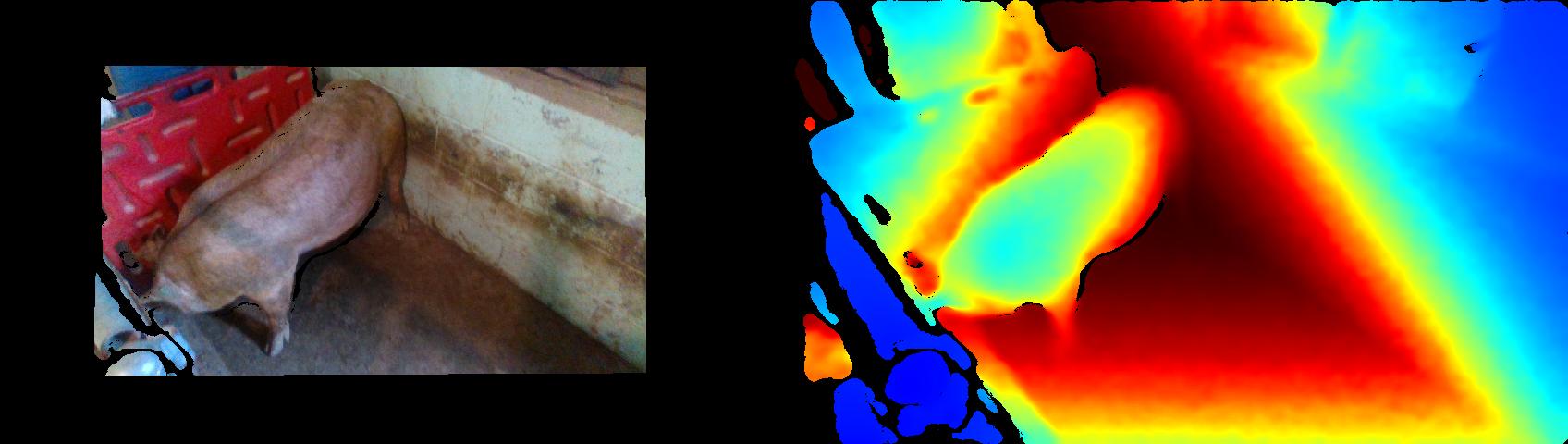
According to viewer application, the last frame extracted by second approach is well before the last frame (see image below)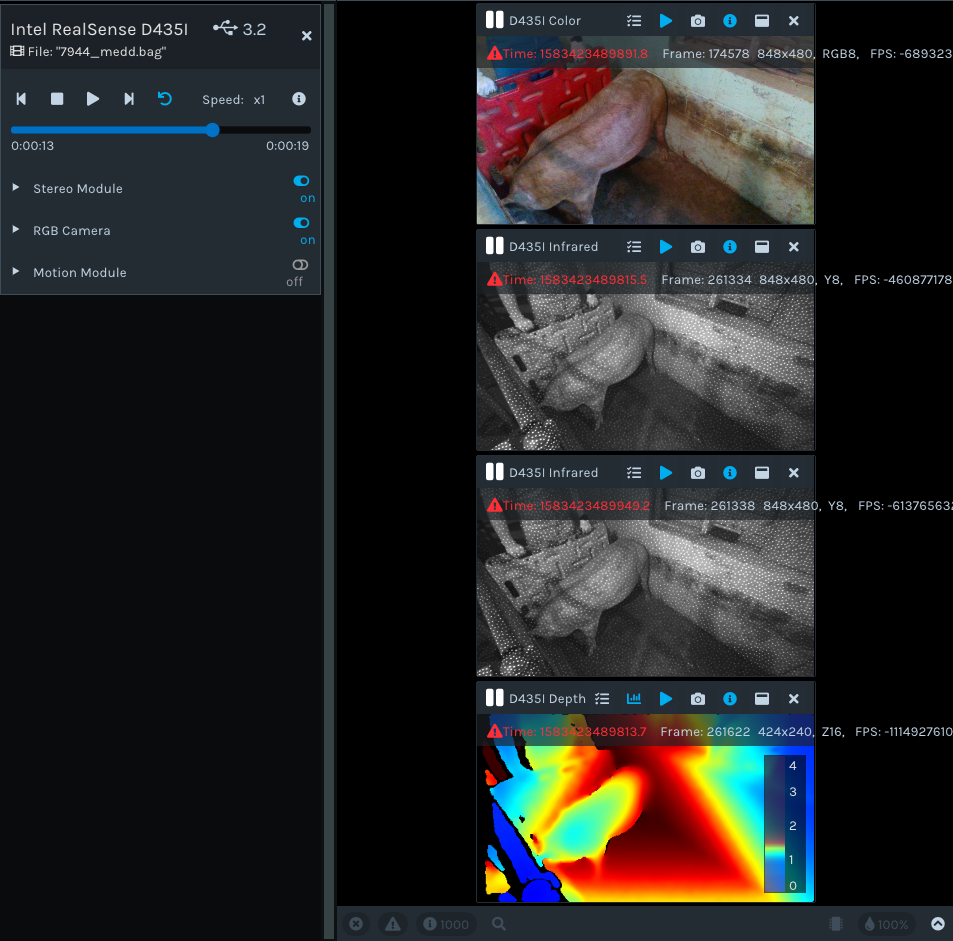
The correct last frame according to viewer application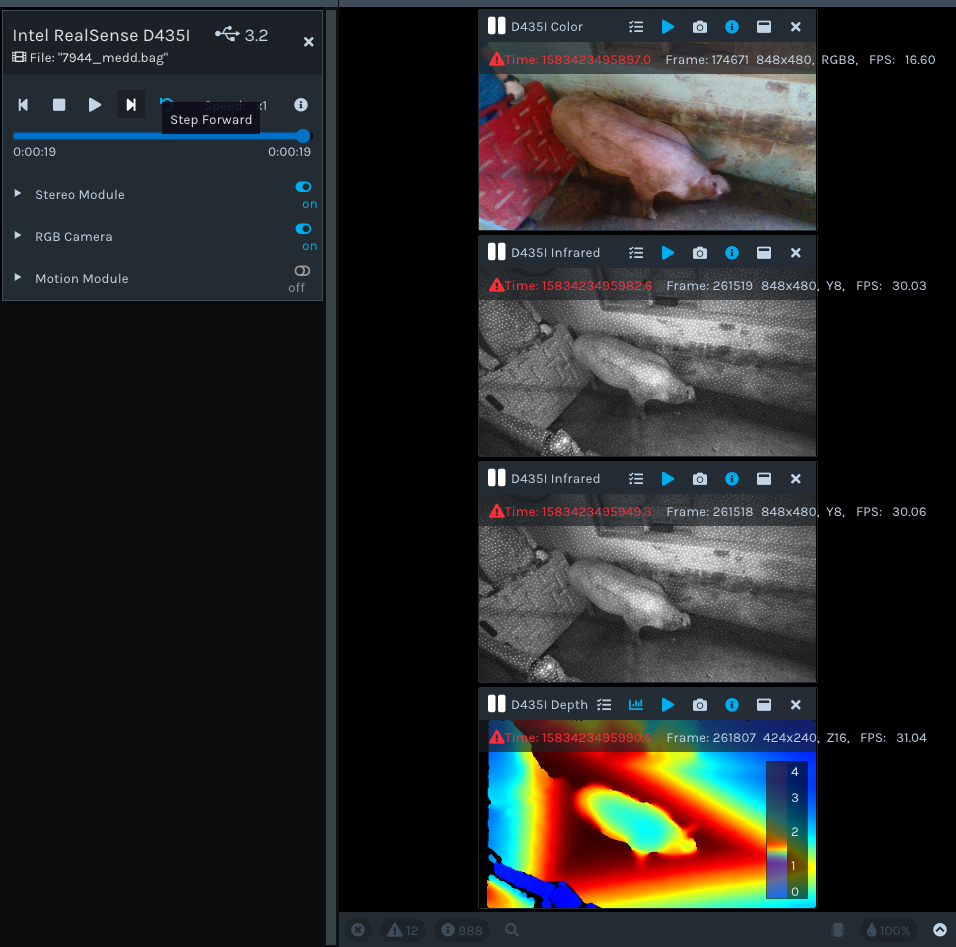
Can someone please explain this behavior? This behavior is creating some troubles for me to create a consistent pipeline for my project. Thanks!