JeremyGrosser
commented
1 year ago
JeremyGrosser
commented
1 year ago I have a fix, but I'm afraid it might break other I2C devices. Please test out the https://github.com/JeremyGrosser/rp2040_hal/tree/issue_49 branch and let me know if it solves your problem.
 hgrodriguez
hgrodriguez
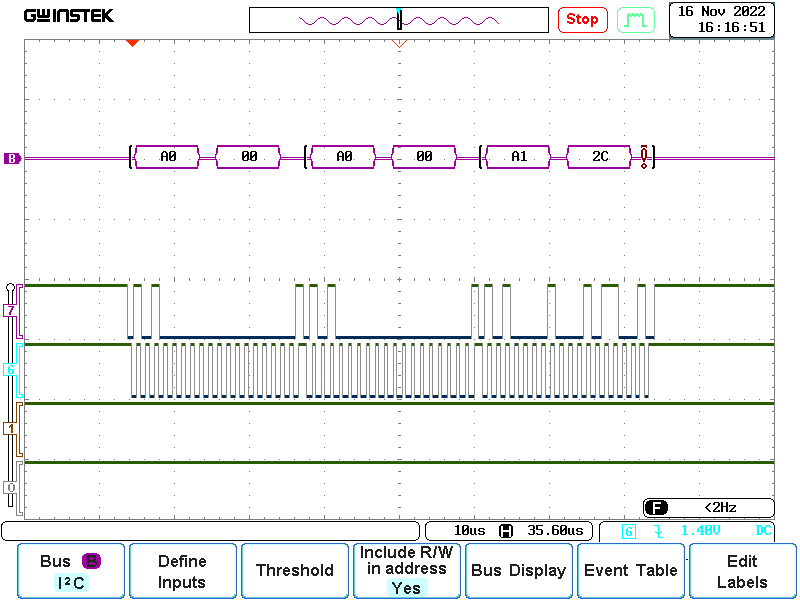
I2C: 16bit EEPROM adresses are split on the SECOND read
Hi Jeremy, I spent some time investigating my code and could not find the problem. Then I came back to your code and adjusted it a little bit to enable me to debug it better. I do appreciate, that you do not have time to resolve this soon, I just wanted to make sure that I used your code (not mine) to reproduce it. Let me know, if I did something wrong.
I have this in my alire.toml: [[depends-on]] pico_bsp = "^2.0.0"
See code below:
I used GDB to step through the program, but the same behaviour is true if run as normal without debugger attached.
Those are the results: Write Data=1 -> OK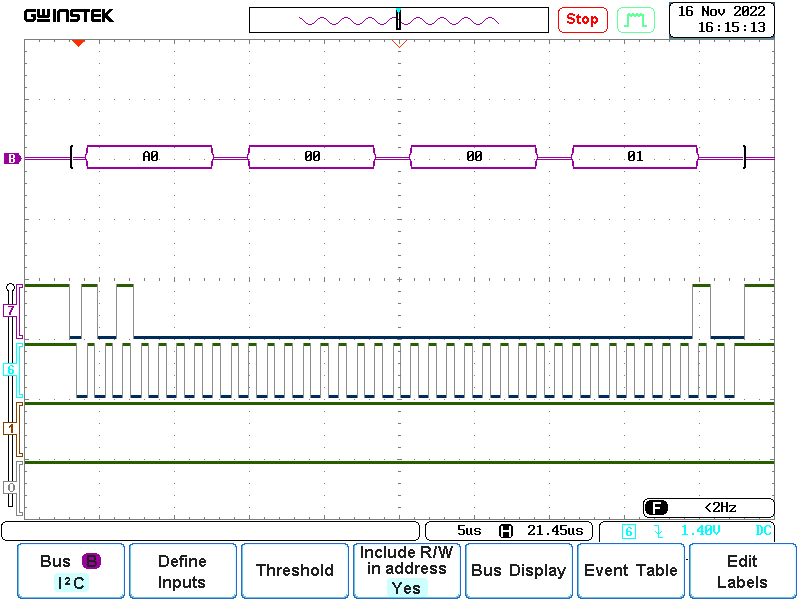
Read Data=1 -> OK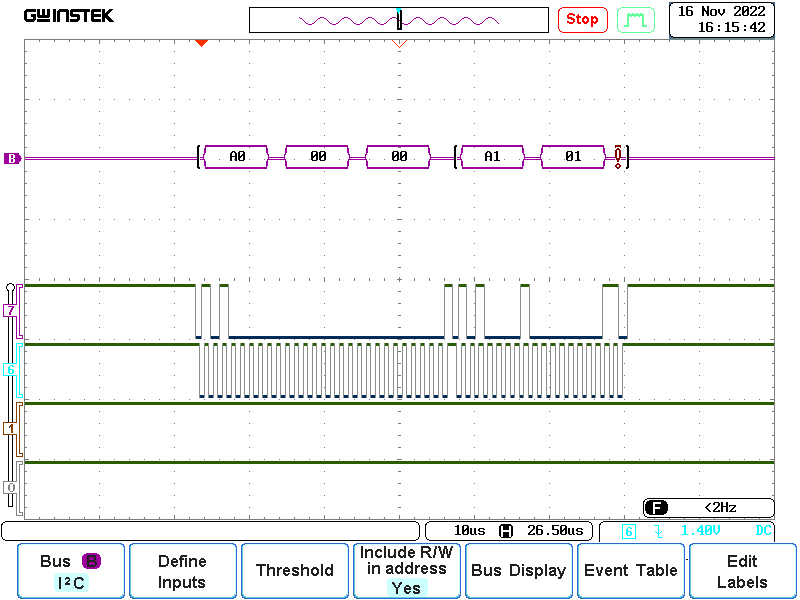
Write Data=2 -> OK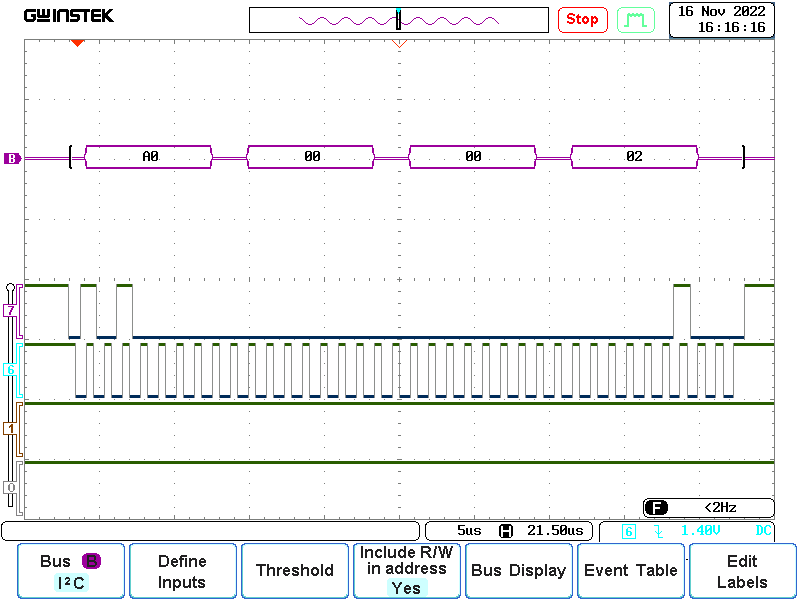
Read Data=2 -> NOK