 codecov[bot]
commented
1 year ago
codecov[bot]
commented
1 year ago Codecov Report
Merging #840 (0bae63a) into master (f62c25c) will not change coverage. The diff coverage is
n/a.
@@ Coverage Diff @@
## master #840 +/- ##
=======================================
Coverage 97.14% 97.14%
=======================================
Files 4 4
Lines 315 315
=======================================
Hits 306 306
Misses 9 9  JuliaControlBot
JuliaControlBot
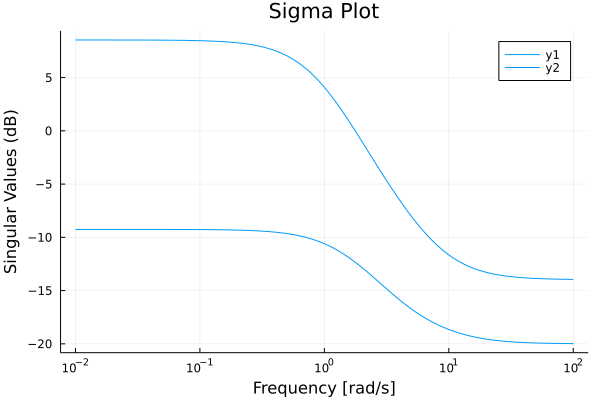
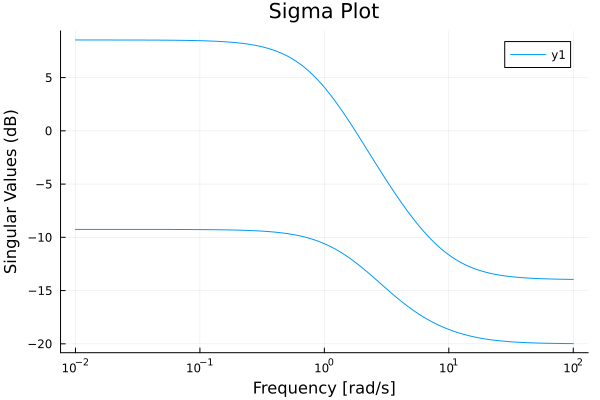

For MISO and SIMO systems, it is significantly faster to call
normrather thansvdvals