 codecov[bot]
commented
1 year ago
codecov[bot]
commented
1 year ago Codecov Report
Merging #854 (6b0b9e3) into master (a82bf19) will not change coverage. The diff coverage is
n/a.
@@ Coverage Diff @@
## master #854 +/- ##
=======================================
Coverage 92.72% 92.72%
=======================================
Files 5 5
Lines 330 330
=======================================
Hits 306 306
Misses 24 24  JuliaControlBot
JuliaControlBot
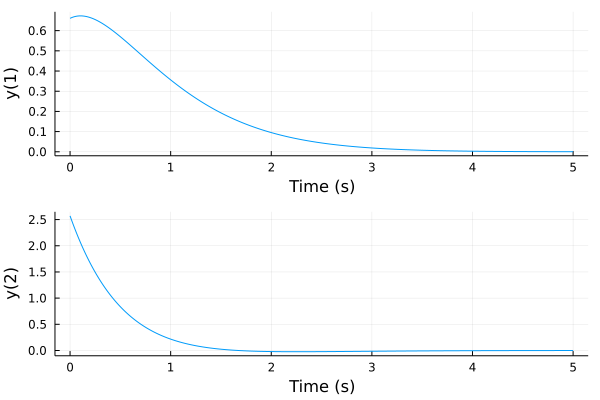
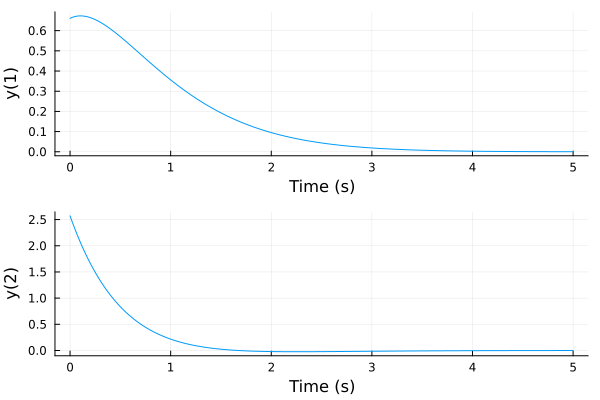

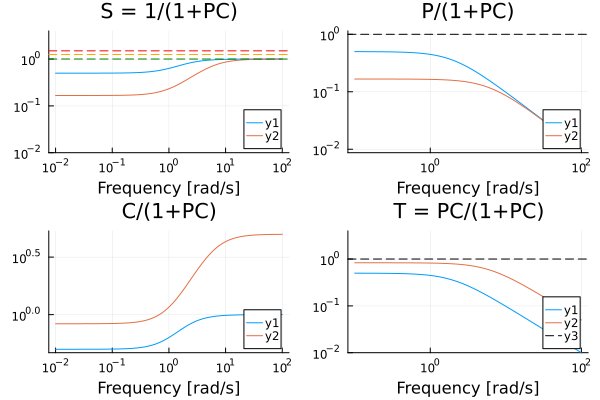
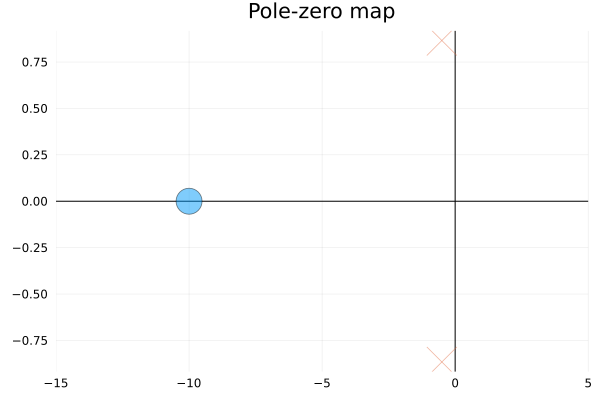
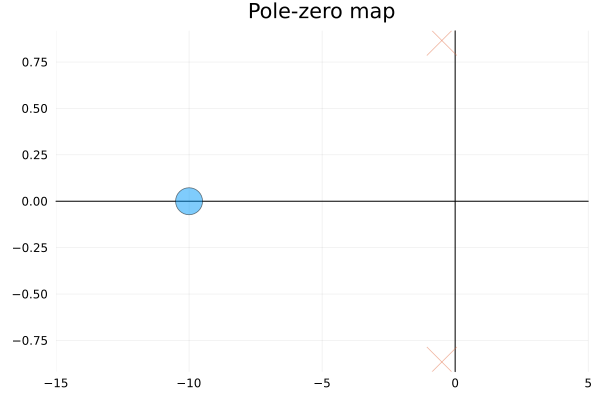
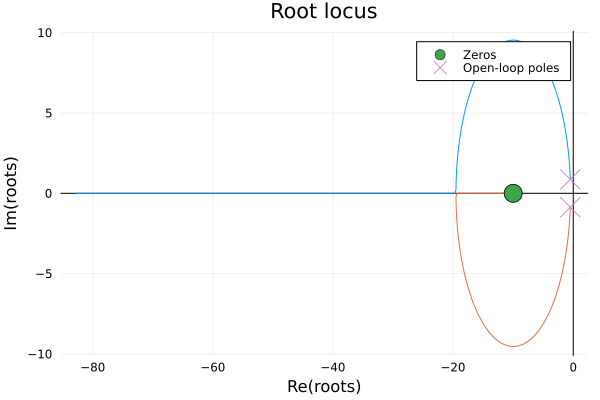
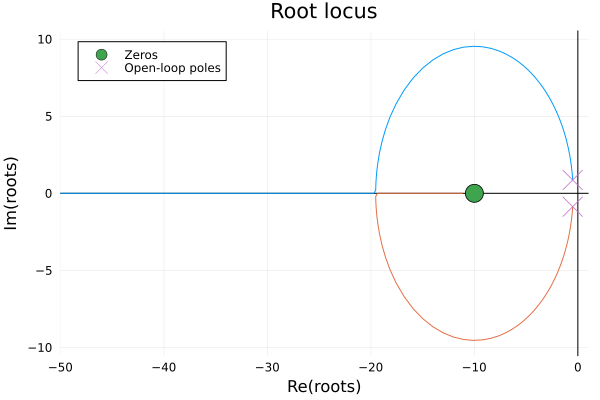
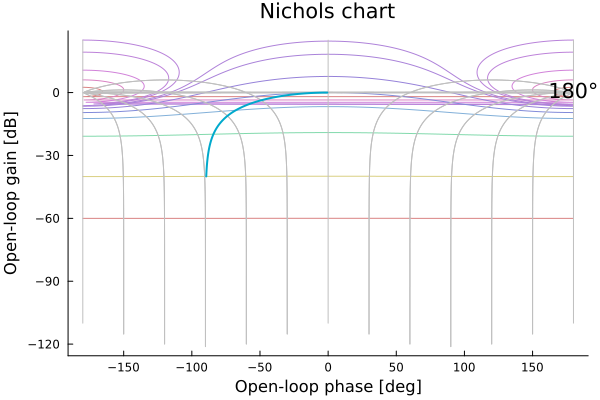
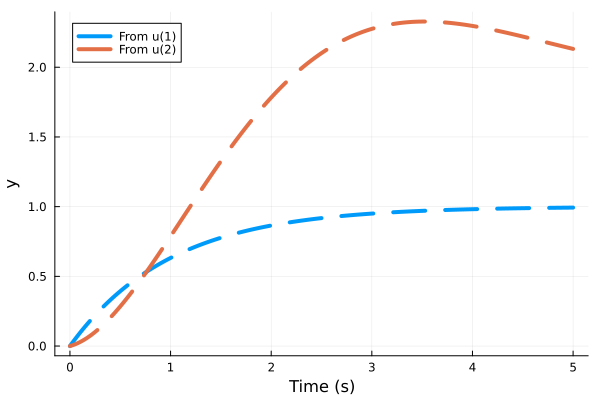
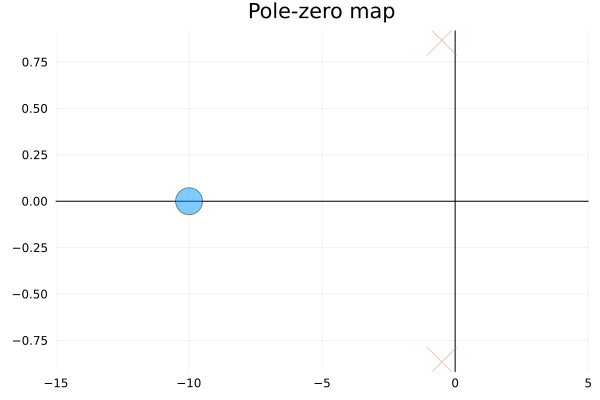
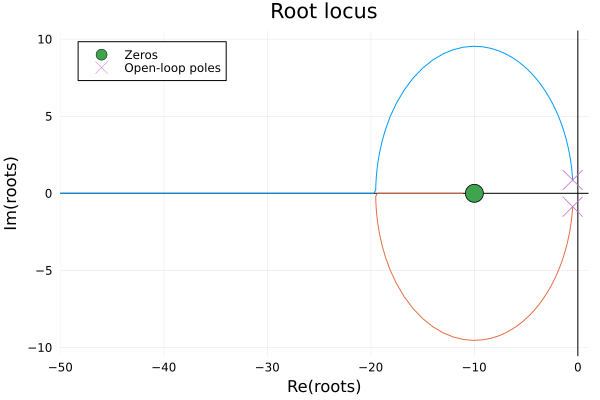
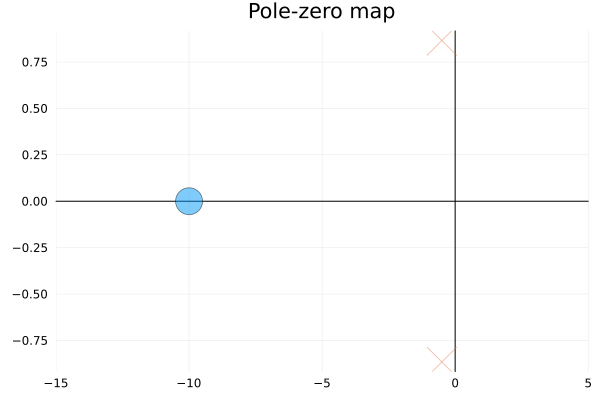
This PR implements the robust pole placement algorithm from
This implementation uses "method 0" for the X-step and the QR factorization for all factorizations.
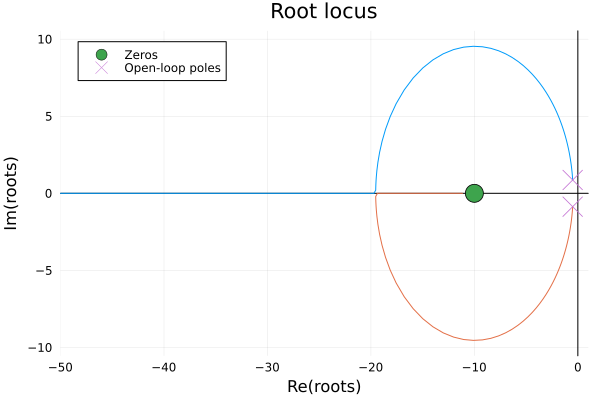
The current implementation works most of the time, but struggles with accuracy for some systems. A possible improvement is to switch "method 0" for any of "methods 2/3" from the paper for the
Xstep.