 JuliaControlBot
commented
1 year ago
JuliaControlBot
commented
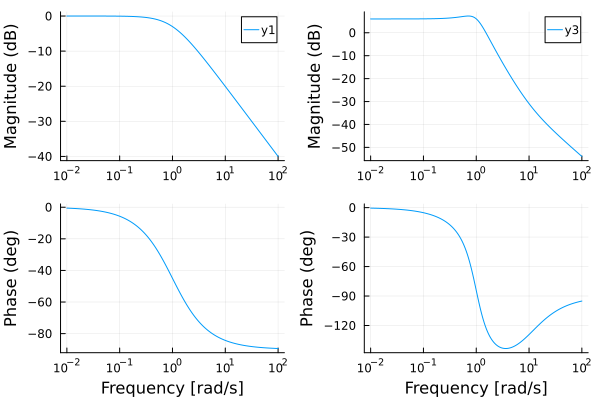
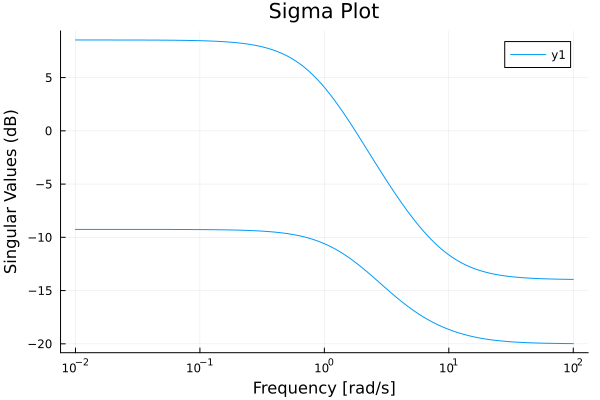
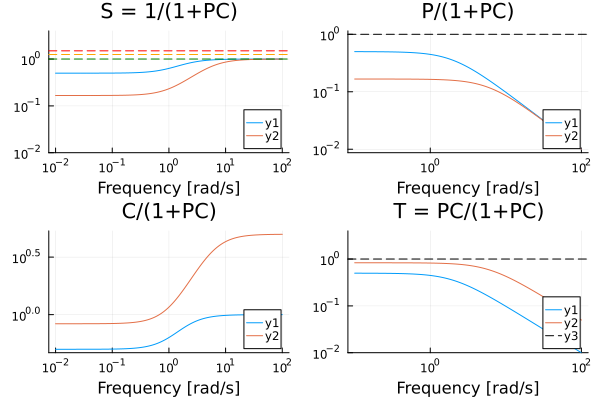
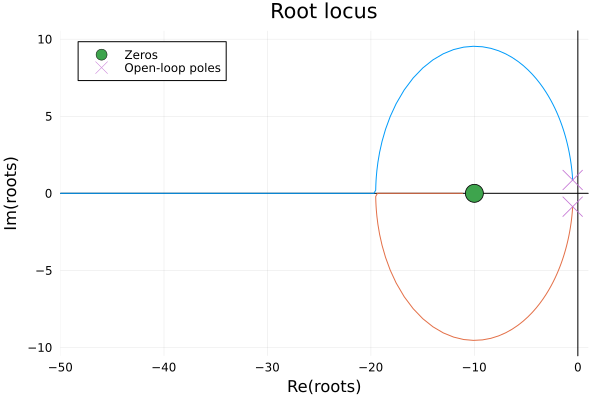
1 year ago | This is an automated message. Plots were compared to references. 11/11 images have changed, see differences below. After pulling this PR, please update the reference images by creating a PR to ControlExamplePlots.jl here. Difference | Reference Image | New Image |
|---|---|---|
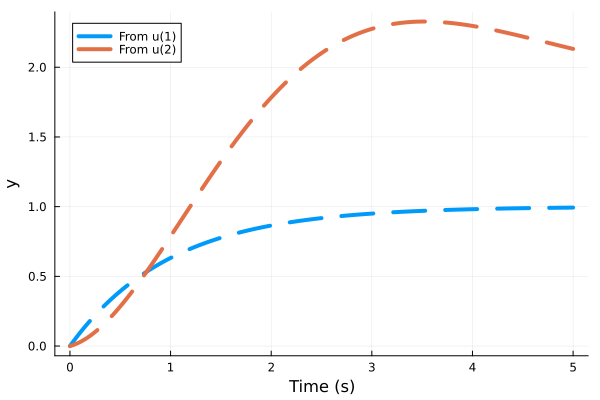
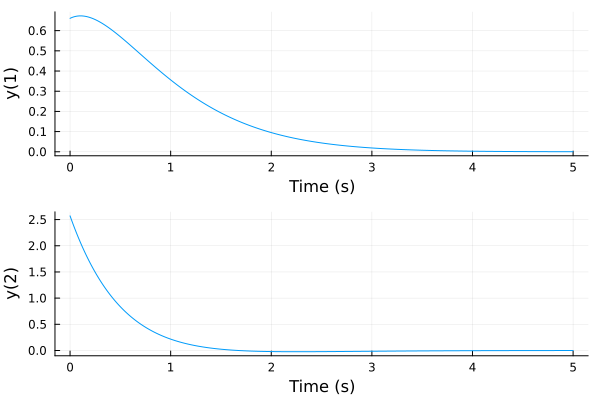
| :x: 0.047 | 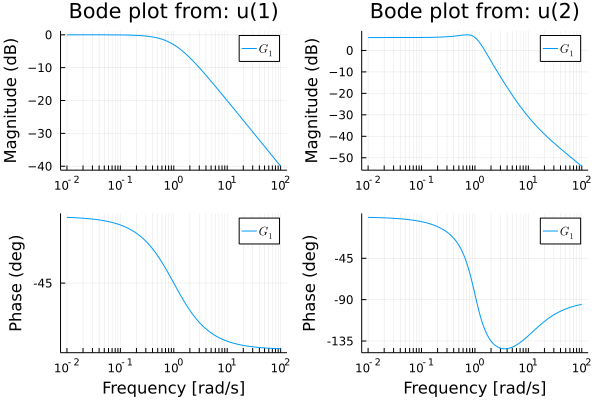 |
 |
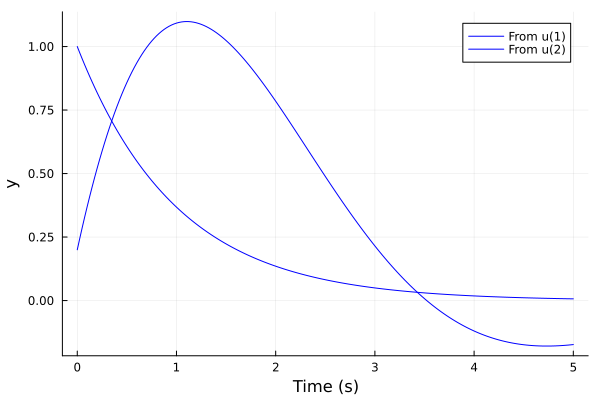
| :heavy_check_mark: 0.011 | 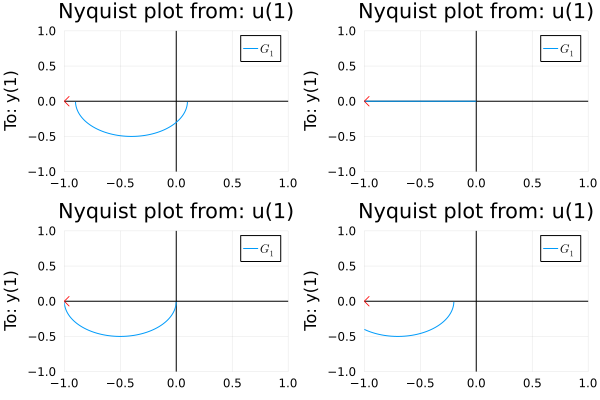 |
 |
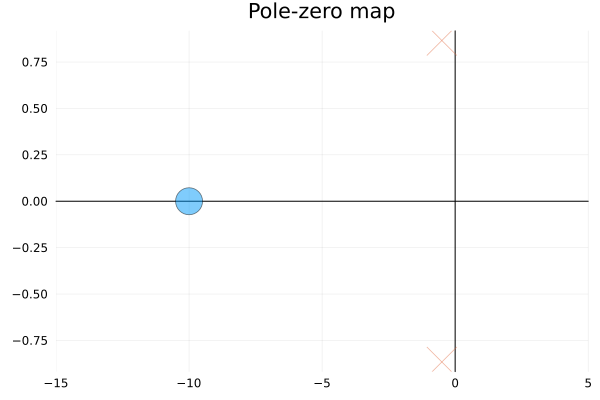
| :heavy_check_mark: 0.001 | 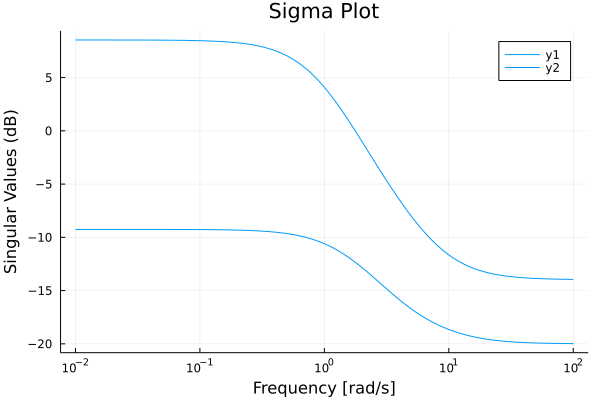 |
 |
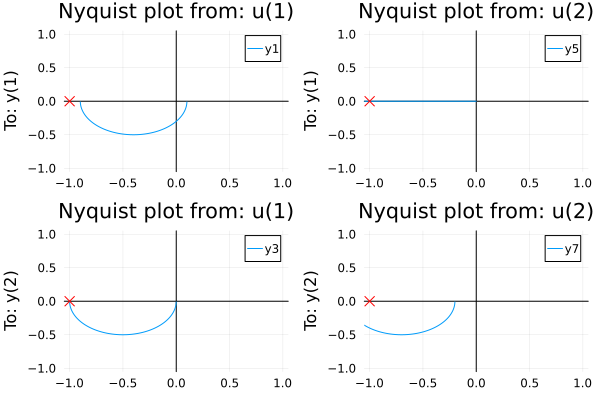
| :heavy_check_mark: 0.001 | 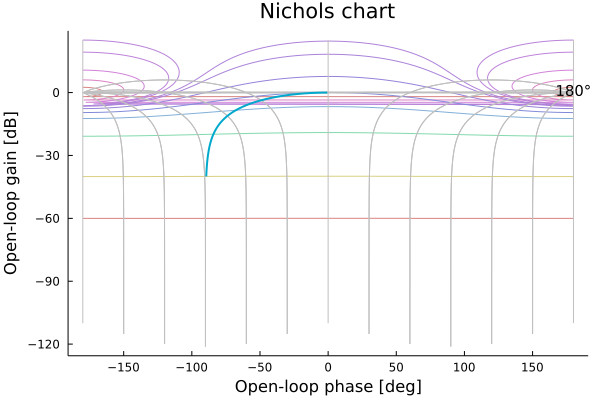 |
 |
| :heavy_check_mark: 0.007 | 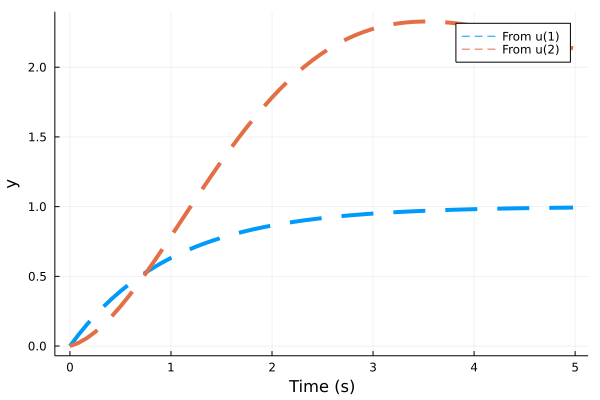 |
 |
| :heavy_check_mark: 0.003 | 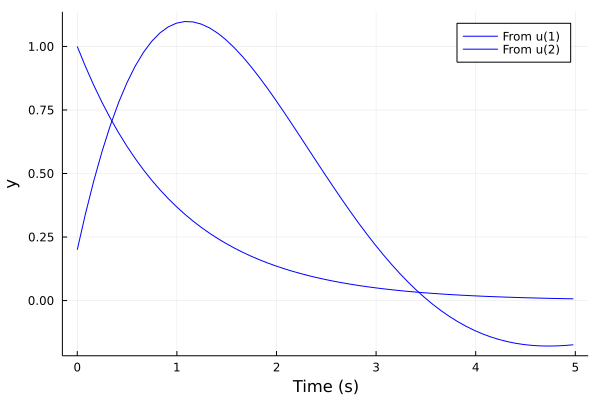 |
 |
| :heavy_check_mark: 0.0 | 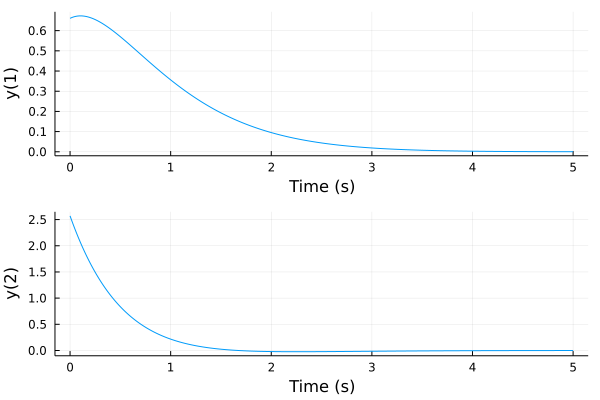 |
 |
| :warning: 0.028 |  |
 |
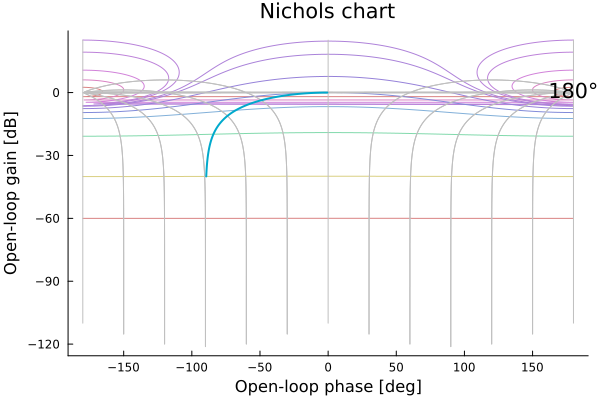
| :x: 0.06 |  |
 |
| :heavy_check_mark: 0.0 | 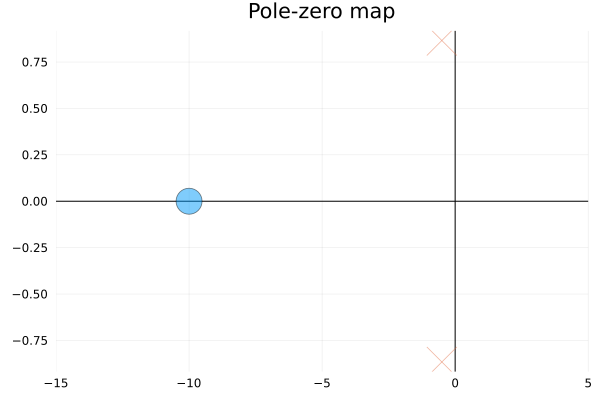 |
 |
| :warning: 0.017 | 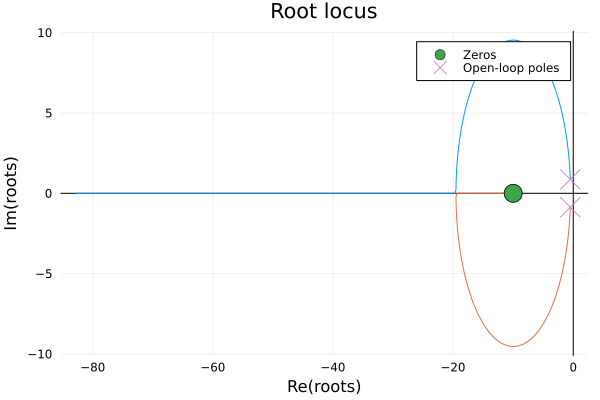 |
 |
 codecov[bot]
codecov[bot] hexaeder
hexaeder baggepinnen
baggepinnen