 codecov[bot]
commented
7 years ago
codecov[bot]
commented
7 years ago Codecov Report
Merging #5 into master will not change coverage. The diff coverage is
100%.

@@ Coverage Diff @@
## master #5 +/- ##
=====================================
Coverage 100% 100%
=====================================
Files 3 5 +2
Lines 210 281 +71
=====================================
+ Hits 210 281 +71| Impacted Files | Coverage Δ | |
|---|---|---|
| src/core.jl | 100% <ø> (ø) |
:arrow_up: |
| src/region_growing.jl | 100% <100%> (ø) |
:arrow_up: |
| src/ImageSegmentation.jl | 100% <100%> (ø) |
|
| src/fast_scanning.jl | 100% <100%> (ø) |
Continue to review full report at Codecov.
Legend - Click here to learn more
Δ = absolute <relative> (impact),ø = not affected,? = missing dataPowered by Codecov. Last update 0d8720a...22e05e5. Read the comment docs.
 annimesh2809
annimesh2809 timholy
timholy tejus-gupta
tejus-gupta
An implementation of the fast scanning algorithm as mentioned in this paper. An extension of this algorithm has also been implemented for working with higher dimensional images. A few features like removal of small segments and use of adaptive threshold will be progressively added. The performance of this algorithm for 2-d images is fantastic. After addition of the above-mentioned features, I will add the docstring and tests.
Here are a demo:
Original: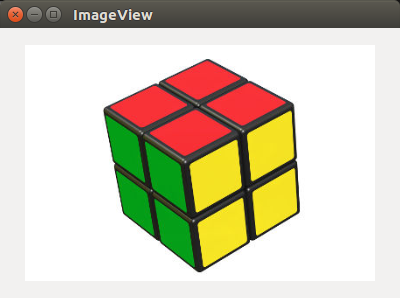
After segmentation and coloring the larger segments (except background):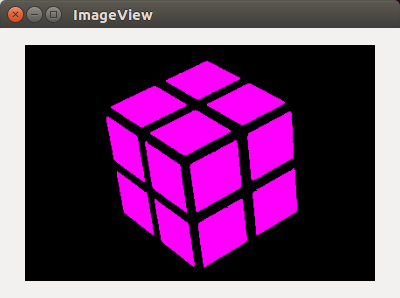
Benchmark results: