 yaoyx689
commented
3 years ago
yaoyx689
commented
3 years ago Hi, setting "paras.pruning_type = SIMPLE;" in "main.cpp" can get good result. Because the initial difference between the source and the target surface is relatively large, we get initial corresponding points using closest point pairs with simple rejection criteria(distance and normal). Please refer to the implementation details in the article. Notice that our method will use rejection in the first iteration and RPTS/NICP will use rejection in all iterations when setting "paras.pruning_type = SIMPLE;", this is determined by the setting of the objective function in each method.
 BaldrLector
BaldrLector

Hi, @Juyong and @yaoyx689 , thanks for kindly sharing the source code. There are so many brilliant ideas and the results are stunning!
However, when i run the code, there some weried results. I run this code at the example data "partial overlap" , mesh_0018.obj to mesh_0020.obj, which shown as follows:
mesh_0018.obj: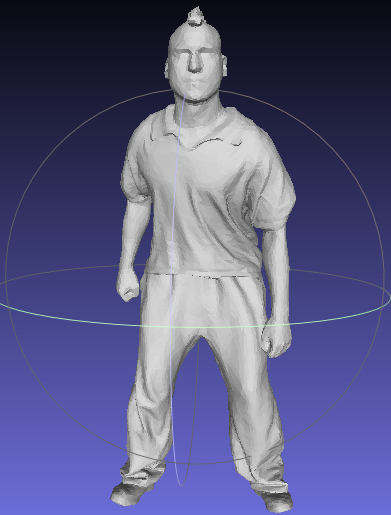
mesh_0020.obj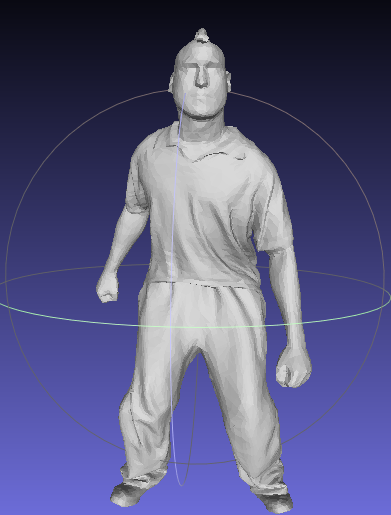
the result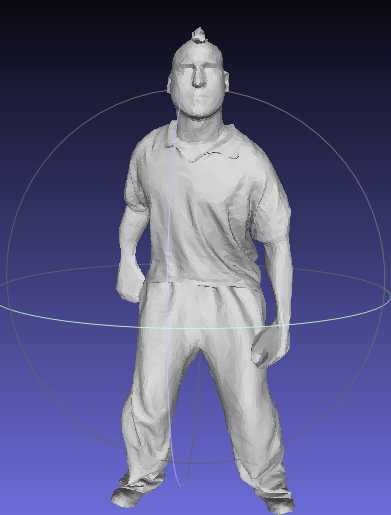
the provided result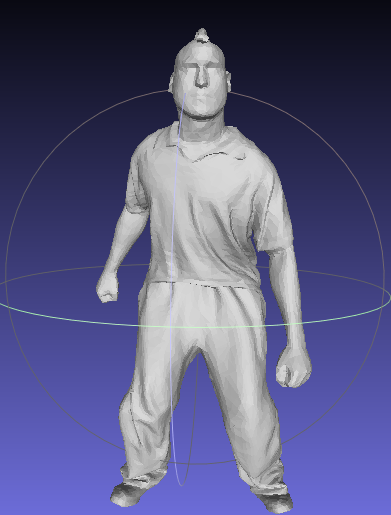
I run the code utilize the code under src_cvpr dir, which utilizes the nearest point as the initial correspondence as defaults. could you tell me why I generate a weird result? Thanks in advance, your reply will vary appreciated.