 hangg7
commented
1 year ago
hangg7
commented
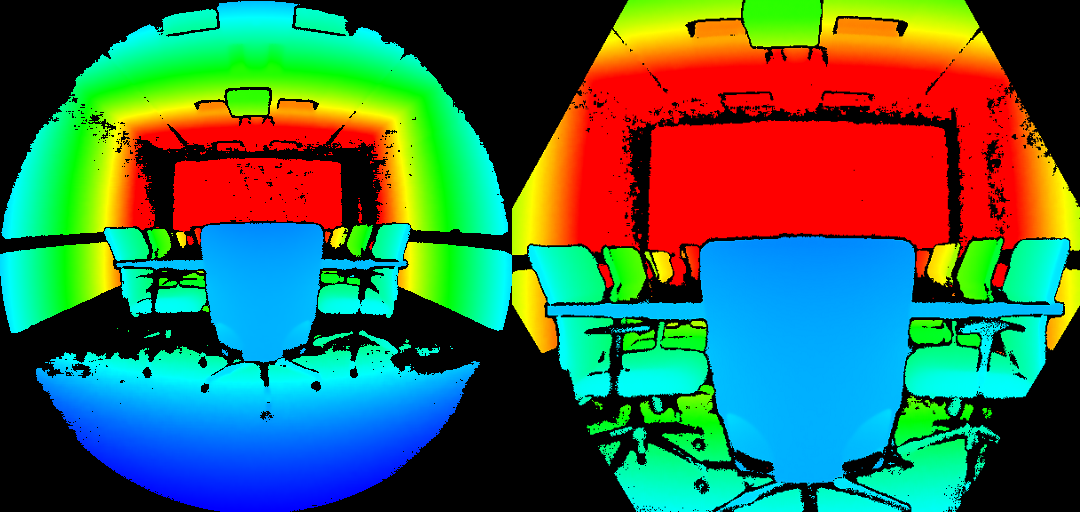
1 year ago Hi! Depth sensing is notoriously noisy around object edges (check Kinect, for example). These regions are marked as invalid by the zero values.
{kind=link}
You can find our data processing code using a sobel filter for this purpose: https://github.com/KAIR-BAIR/dycheck/blob/7d336d2d3ef72dcaa7a687241e85e788a837c84a/dycheck/datasets/iphone.py#L282-L284 Additionally, those invalid depth should not contribute to the training process: https://github.com/KAIR-BAIR/dycheck/blob/7d336d2d3ef72dcaa7a687241e85e788a837c84a/dycheck/core/losses/depth.py#L27-L34
We have experimented with training without sobel filtering -- noisy depth is pretty harmful for the final results.
Hi,
I am visualizing the depth maps of the Iphone dataset and I found that there are a lot of pixels on the edge of the objects doesnt have any depth values. Would you mind explaining why the depth obtained from Lidar is like that ? Thanks !