 ShaoxiongYao
commented
1 year ago
ShaoxiongYao
commented
1 year ago I attach the code block to read the measurements here:
with utilities.DeviceConnection.createTcpConnection(args) as router:
with utilities.DeviceConnection.createUdpConnection(args) as router_real_time:
# Create required services
base = BaseClient(router)
base_cyclic = BaseCyclicClient(router_real_time)
input("INFO: press enter to start collecting data")
for _ in range(tot_num_steps):
iter_start_time = time.time()
base_feedback = BaseCyclic_pb2.Feedback()
base_feedback = SendCallWithRetry(base_cyclic.RefreshFeedback, 3)
ee_x = base_feedback.base.tool_pose_x # (meters)
ee_y = base_feedback.base.tool_pose_y # (meters)
ee_z = base_feedback.base.tool_pose_z # (meters)
ee_theta_x = base_feedback.base.tool_pose_theta_x # (degrees)
ee_theta_y = base_feedback.base.tool_pose_theta_y # (degrees)
ee_theta_z = base_feedback.base.tool_pose_theta_z # (degrees)
ee_pose_vec = np.array([[ee_x, ee_y, ee_z, ee_theta_x, ee_theta_y, ee_theta_z]])
ee_pose_ary = np.append(ee_pose_ary, ee_pose_vec, axis=0)
f_x = base_feedback.base.tool_external_wrench_force_x
f_y = base_feedback.base.tool_external_wrench_force_y
f_z = base_feedback.base.tool_external_wrench_force_z
tau_x = base_feedback.base.tool_external_wrench_torque_x
tau_y = base_feedback.base.tool_external_wrench_torque_y
tau_z = base_feedback.base.tool_external_wrench_torque_z
f_vec = np.array([[f_x, f_y, f_z, tau_x, tau_y, tau_z]])
wrench_ary = np.append(wrench_ary, f_vec, axis=0) felixmaisonneuve
felixmaisonneuve

Summary
Improve end-effector force/torque measurement accuracy.
Use case
Detect end-effector collision with other objects or control contact force. Currently the end-effector APIs
base_feedback.base.tool_external_wrench_force_x/y/zandbase_feedback.base.tool_external_wrench_torque_x/y/zare not sufficiently accurate.Alternative
Maybe there is a way to calibrate the wrench measurement?
Possible issues
Should not have negative impacts on other features.
Additional context
Here is an experiment I have on the current end-effector wrench measurements API, where the robot arm periodically moves forward and backward in the x-axis. The first figure show the relation between x-axis coordinate over time: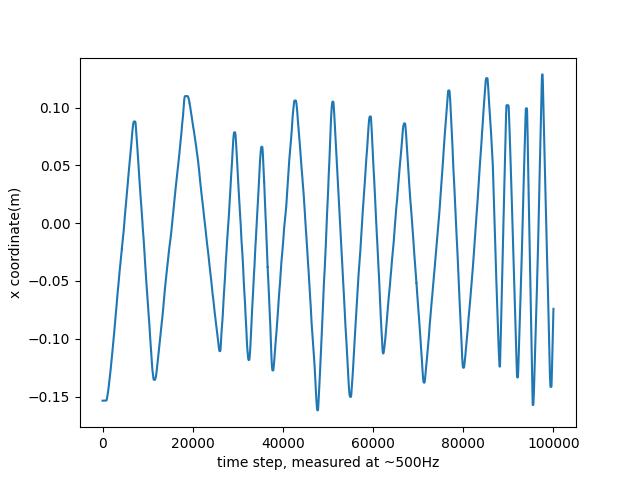
The second figure shows the force in the x direction measured at each x coordinate, in a scatter plot: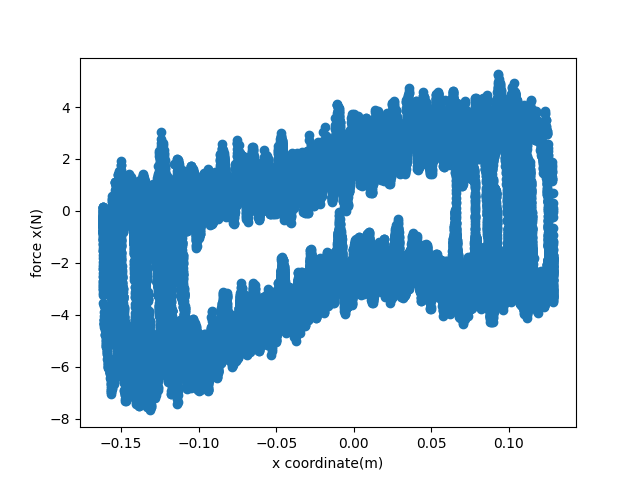
We may see depending on different moving directions, the force measurements are quite different. For more information, there is the robotiq85 gripper mounted on the end-effector and there is no object grasped or hanging on the gripper. So I expected zero force and torque measurements of the end-effector wrench.