 klipper-gitissuebot
commented
4 years ago
klipper-gitissuebot
commented
4 years ago Hi @trevjonez,
It did not look like there was a Klipper log file attached to this ticket. The log file has been engineered to answer common questions the Klipper developers have about the software and its environment (software version, hardware type, configuration, event timing, and hundreds of other questions).
Unfortunately, too many people have opened tickets without providing the log. That consumes developer time; time that would be better spent enhancing the software. If this ticket references an event that has occurred while running the software then the Klipper log must be attached to this ticket. Otherwise, this ticket will be automatically closed in a few days.
For information on obtaining the Klipper log file see: https://github.com/KevinOConnor/klipper/blob/master/docs/Contact.md
The log can still be attached to this ticket - just add a comment and attach the log to that comment.
Best regards, ~ Your friendly GitIssueBot
PS: I'm just an automated script, not a human being.
 KevinOConnor
KevinOConnor trevjonez
trevjonez ETE-Design
ETE-Design
Kevin:
I've just been updating one of my machines to use some new drivers and the latest klipper code. What I am finding is that the default of using diag1_stall is not appropriate for these step sticks.
I've been able to workaround by modifying this line to reference "diag0_stall" instead.
Would you be open to a pull request that exposes a configuration option to customize which register to use? It seems only the 2130 and 5160 could be impacted by such a change. Though I am doubtful any 2130 driver layout would need this change or you would have likely seen this issue before.
Or is the timing of homing override gcode timing appropriate that I could use a
SET_TMC_FIELDto set the value immediately preceding aG28command? Skimming the extras files made it seem like any value I set would be overridden byhandle_homing_move_beginhttps://wiki.fysetc.com/S5160_V1.2/ https://github.com/FYSETC/TMC-Stepstick-Divers/blob/master/hardware/S5160/V1.2%203020/FYS_TMC5160_V1.2.pdf
Notes for SEO:
Similar to other 5160 stepsticks in order to get sensorless homing to function some modifications to the driver need to be made. The FYSETC 5160 v1.2 driver exposes the CLK pin via pin3 on connector P2. For sensorless homing to work you need to remove that pin and connect it to ground (pin 1 on connector P6). Additionally you will need to add a pin to the board on pin 2 of connector P1 in order to connect the diag0 signal to the MCU.
This was for use with an FYSETC S6 V1.2
All done, it looks like this: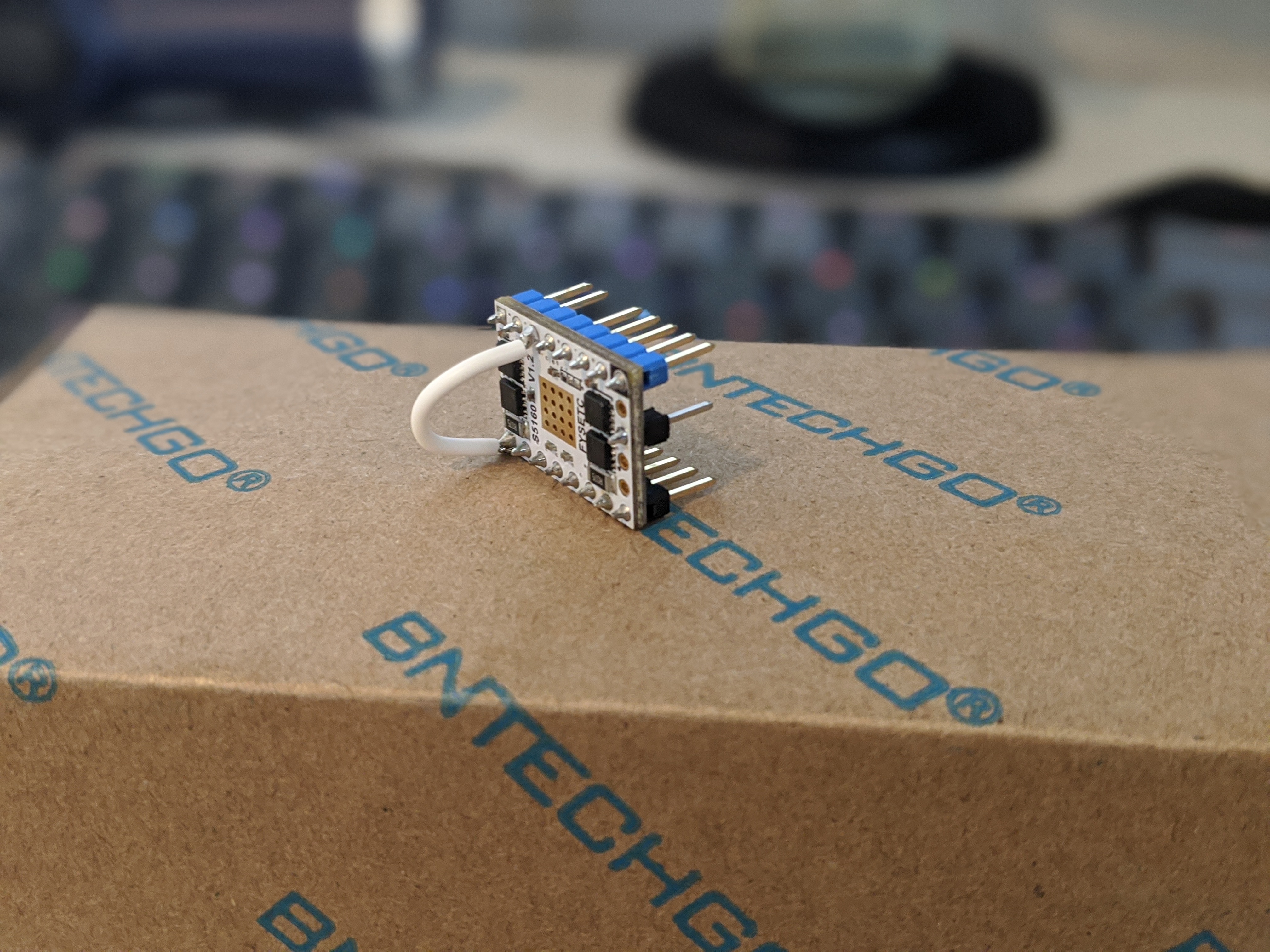
config for one of the machines setup with this is here: https://github.com/trevjonez/klipper-configs/blob/MK3-Bear-2/fysetc_s6_bear.cfg