 Lars-Ki
commented
2 years ago
Lars-Ki
commented
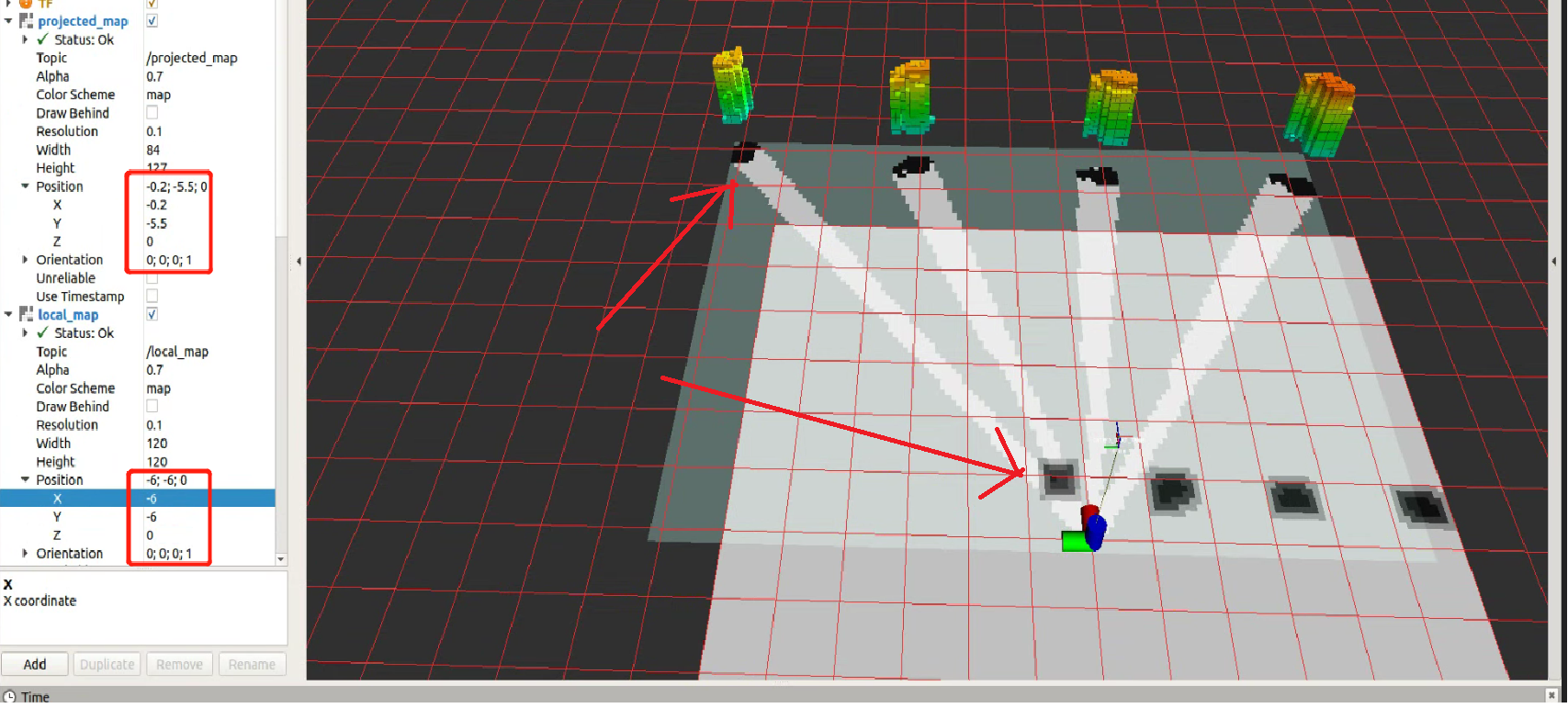
2 years ago Hi mjmyt Hopefully, I understood your question correctly. The local_map and the projected_map are not supposed to be aligned. As you continue your mission your projected_map (or also called global map [because it has all the information about the occupancy of the world at some point]) grows. The passage you want to find a solution for is only a fraction of the size of the global_map. For this, you don't want the local map to be too big because it increases calculation time. In the second gif in the README you see that the local map changes over time. This is intended.
Hope that helped.
Best regards,
Lars-Ki
 mjmyt
mjmyt

 Or do you have any other suggestions?
Look forward to your reply
Or do you have any other suggestions?
Look forward to your reply
Hi Lars-Ki,you are so patient.Unfortunately, I meet a new problem. when I adjust pixel_size with 0.1m and safety distance radius with 0.5.I find the centre of local_map is not aligned with project_map,As shown in the picture:first photo is in your paper,the second is my.
Where do I need to modify it in local_map_publisher.py Look forward to your reply and Thanks again。