HangX-Ma
commented
2 years ago
HangX-Ma
commented
2 years ago @LenaShengzhen
Closed HangX-Ma closed 2 years ago
HangX-Ma
commented
2 years ago @LenaShengzhen
 LenaShengzhen
commented
2 years ago
LenaShengzhen
commented
2 years ago Good Question.
I haven't read "JPS Algorithm Adaptation and Optimization to Three-dimensional Space".
For your screenshots from this paper, the results of this formula of diagonal direction are contradictory to the results of the screenshots in this paper. I think you could send email to the author asking about this question and to find whether the diagonal formula of 3D-JPS has changed compared with 2D-JPS, or we miss something.
HangX-Ma
commented
2 years ago Thanks a lot for your answer.
After reading the code in KumarRobotics/jps3d , I figured out that more rules should be added to explain the expanding situations in 3D space. I'm trying to explain those special situations.
I will close this issue and hope others can get help from jps3d.
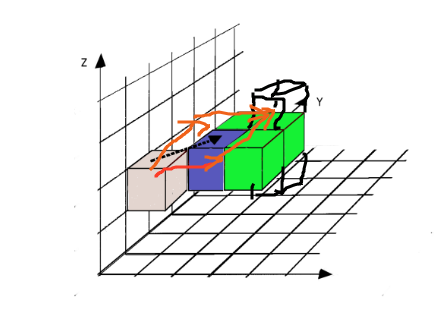
Hi, Lena. I have read the JPS part of your paper, TRAJECTORY PLANNING BASED ON OPTIMIZED JUMP POINT SEARCH RESULTS USING ARTIFICIAL POTENTIAL FIELD IN 3-D ENVIRONMENTS. In this part, you explain the situation about the straight move in 3D space of JPS. It's understandable and clear. I have read a similar paper, JPS Algorithm Adaptation and Optimization to Three-dimensional Space written by Pertti Ranttila and Kesäkuu. 2019, who explains the one-axis, two-axis, three-axis situations. But I was confused by some question when I wanted to calulate the natural neighbor in two-axis situation. In JPS Algorithm Adaptation and Optimization to Three-dimensional Space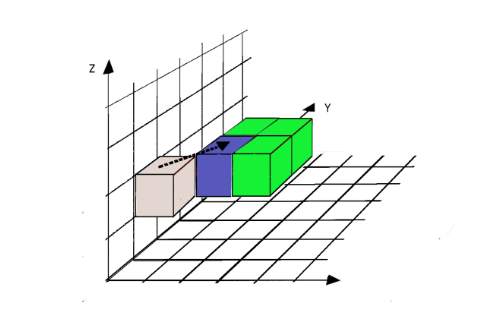 In Planning Dynamically Feasible Trajectories for Quadrotors using Safe Flight Corridors in 3-D Complex Environments
In Planning Dynamically Feasible Trajectories for Quadrotors using Safe Flight Corridors in 3-D Complex Environments
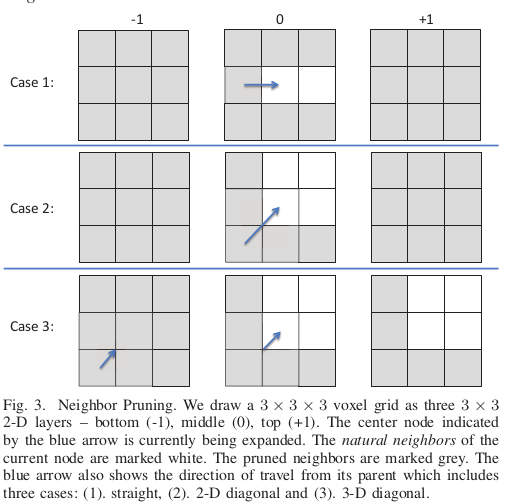 They all prune the top layer and bottom layer in the 3x3 cubic in two-axis situation. However, according to the definition of the natural neighbor,
They all prune the top layer and bottom layer in the 3x3 cubic in two-axis situation. However, according to the definition of the natural neighbor,
Straight Moves:,...,n>\\x)<=len(<p(x),x,n>) ) Diagonal Moves:
Diagonal Moves:,...,n>\\x)<len(<p(x),x,n>) )
I found that start from the grey voxel, the cost that I go through the blue voxel and reach the voxel whose cost is sqrt(3) (you can image the corner voxels at the top or bottom layer) is the same as the cost that I go through the voxel that is direct above or below the blue voxel and reach the corner voxels. Why those two voxels cannot be the natural neighbor ? Those two voxels cannot be pruned according to the pruning policy (If my assumption is correct).