thinkyhead
commented
6 years ago
thinkyhead
commented
6 years ago I think you're onto something. This is the constructor for TMC26XStepper…
TMC26XStepper(int number_of_steps, int cs_pin, int dir_pin, int step_pin, unsigned int current, unsigned int resistor=150); chriscg9
chriscg9
 boelle
boelle github-actions[bot]
github-actions[bot]
TMC262BOB40 does not to function. Link to product page https://www.digikey.com/product-detail/en/trinamic-motion-control-gmbh/TMC262-BOB40/1460-1243-ND/8037670 When configured in the firmware the drivers do not work
I decided to do some digging and found somethings that once changed allowed this driver to function. stepper_indirection.cpp Was (Enable is done via spi not pins so why is enable pin set here?)
Fixed (changed the order and switched enable with CS)
With this changed i noticed that once the board booted up the motor would enable and hold rotor position and when told to move it would stop holding rotor position. So it would seem the logic is reversed for enable in SPI or just this BOB is different than the normal 26x boards.
I found what i was looking for and changed them see comment for what it was
So i am unsure if the changes i have made will have any ill consequences down the road. But for the moment i am able to run the motors and power some very big steppers considering i get a full 2.8A at 40V
Any thoughts on the changes?
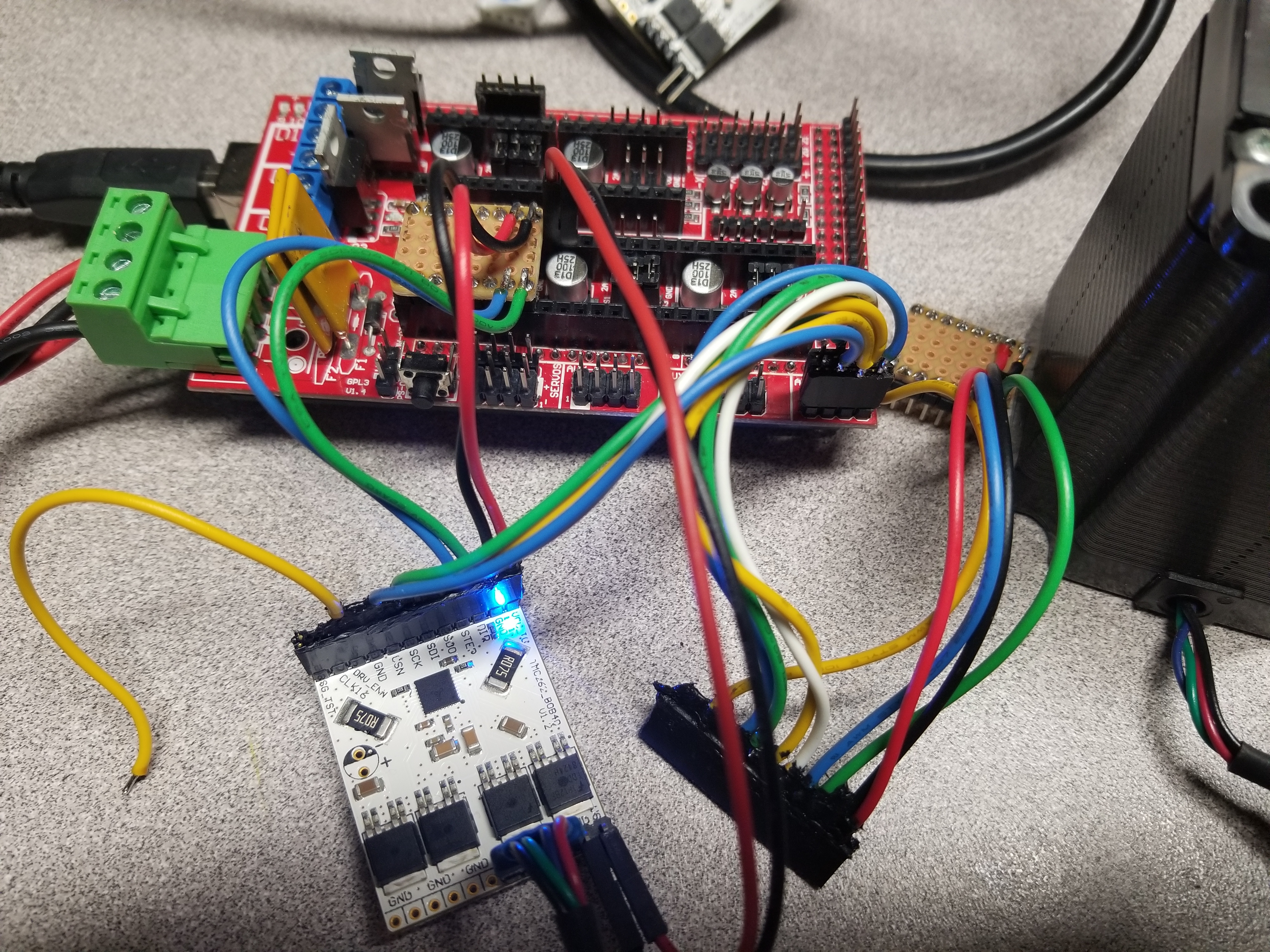
Picture of rough setup for bench testing before being put into a Stratasys FDM