 thinkyhead
commented
6 years ago
thinkyhead
commented
6 years ago Start with non-TMC2130 steppers and get everything working solidly. Only after that should you start working with TMC2130 drivers. This will help to ensure that you have everything configured and that TMC2130-specific issues aren't holding you back.
 govido
govido viper93458
viper93458 crzcrz
crzcrz ghost
ghost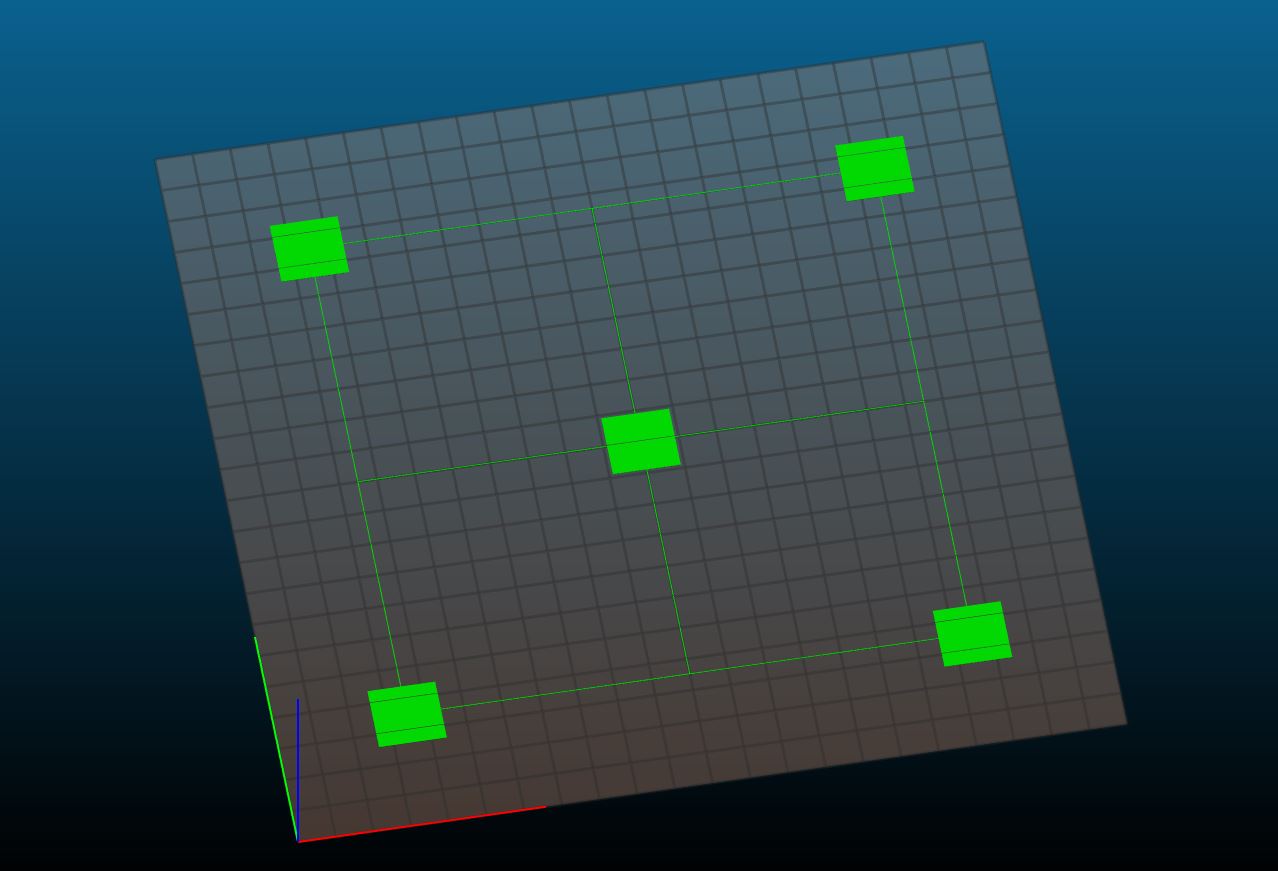 But what the printer gives me is this crappy piece. The axis move completely random in different directions. The outer lines are printed first, but as you can see no infill ever hit the target even slightly.
This happens with linear advance on or off, doesn't matter.
I'm using the 2.0 bugfix from today (07/01).
Does anyone have an idea what is going on here?
But what the printer gives me is this crappy piece. The axis move completely random in different directions. The outer lines are printed first, but as you can see no infill ever hit the target even slightly.
This happens with linear advance on or off, doesn't matter.
I'm using the 2.0 bugfix from today (07/01).
Does anyone have an idea what is going on here?
 (the Z-axis is slightly to high on the right side, but a crashing x-axis and y-axis is more of a problem here)
(the Z-axis is slightly to high on the right side, but a crashing x-axis and y-axis is more of a problem here) I stripped my config to the basics to get this print working with stealthchop at maximum travel speed of 100mm/s. The interesting part is, if I alter this config only by disabling stealthchop the extruder stops moving. Step pulse 0 worked also with one special combination but ended smashing into the axis... I am not 100% sure what the real cause of this really is. Is there something in the driver handling of spreadcycle that changed in the last months? I am using arduino IDE 1.9 for compiling btw. with the libraries of their repository.
I stripped my config to the basics to get this print working with stealthchop at maximum travel speed of 100mm/s. The interesting part is, if I alter this config only by disabling stealthchop the extruder stops moving. Step pulse 0 worked also with one special combination but ended smashing into the axis... I am not 100% sure what the real cause of this really is. Is there something in the driver handling of spreadcycle that changed in the last months? I am using arduino IDE 1.9 for compiling btw. with the libraries of their repository.  GasM0nkey
GasM0nkey frech-tech
frech-tech LichtiMC
LichtiMC ModMike
ModMike yagona
yagona
 erikkallen
erikkallen

 moracabanas
moracabanas boelle
boelle lookiamluke
lookiamluke harleycarr
harleycarr Gerggg
Gerggg ptyork
ptyork claymore666
claymore666 gloomyandy
gloomyandy LastDragon-ru
LastDragon-ru pkucmus
pkucmus
Hi,
i'm desperatly trying to get my printer working with 32-bit hardware. I use a (heavily) modified Ramps 1.4 Board on top of an arduino due with TMC2130 for X,Y,Z and E0. The first time I used a marlin 2.0 version from june 3rd 2018. With this version everything was working fine, apart from very heavy steploss after the first printed layer. This resulted in the printhead smashing into the end of the x-axis and very noisy steppers. This wasn't a problem with the old 8-bit hardware I was using previously (Mega/Ramps/2130/Marlin2.0).
The problem I have with the latest builds (from yesterday and a few hours ago with added esp32 support): Everything seems to be working fine, the new options #define MINIMUM_STEPPER_PULSE 0
define MAXIMUM_STEPPER_RATE 400000 seem to kill the whining noise from the steppers.
But one thing I can't figure out after hours of testing is that the extruder motor won't move in the slightest... I deactivated extrusion prevention, even flashed a firmware without it. Nothing changes... I edited the pins file to swap the stepper drivers E0 with the X one. Nothing again The machine homes OK, starts printing but the extruder motor won't move. The motor is moving if I plug the X motor cable in the E0 motor and move the axis.
Is there any (new?!) option in Marlin that I am not aware of? The part that is puzzling to me is that the stepper driver was working in the version from a few weeks ago. The stepper driver is enabled (stepper is hard to turn by hand) and disabled if the power is off. Any ideas would be appreciated.