 govido
commented
6 years ago
govido
commented
6 years ago Hi, I run my steppers at STALL_VALUE 1. If you go higher than 8 it will be less likely to trigger. So you should test values like 1, 0 or even -10 or so. The rest sounds ok to me. As long as the Diag1 pin is connected to X-min endstop pin on the board (and Y) it should work.
 rodrigosclosa
rodrigosclosa wbarber69
wbarber69 teemuatlut
teemuatlut HWiese1980
HWiese1980 matthew73210
matthew73210 comps
comps mbuc
mbuc thinkyhead
thinkyhead boelle
boelle safaenet
safaenet lucassing
lucassing
 github-actions[bot]
github-actions[bot]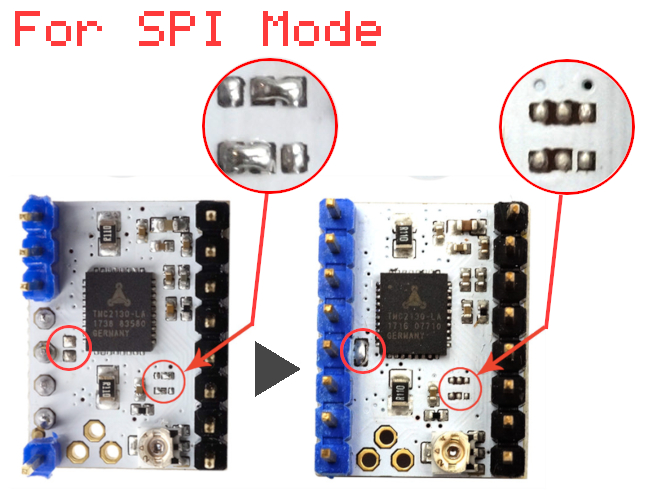{kind=link}
How are you guys, all right?
I'm in a dilemma for setting up the sensorless homing with the TMC2130 drivers, with Ramps 1.4 and Arduino Mega. I bought these from china already in the SPI-enabled version in the hope of being easy to configure the sensorless homing.
I already used a TMC2130 before I bought it without being SPI and had to make the modifications to make it work with SPI (I followed the tips of topics here). I bought these for not having been able to enable the sensorless homing in the old as well. This version is sold on Aliexpress:
https://en.aliexpress.com/item/4X-MKS-TMC2130-V1-1-To-Stepstick-Stepper-Motor-Driver-de-Fun-o-SPI-with-Dissipador/32850172695.html?spm= a2g0s.9042311.0.0.38b2b90a7GC1In
They already have the CFG4 and CFG5 with a small resistor, without the SPI resistor and already with the SPI pins welded up. I just added a pin to DIAG1 (which is the pad closest to the potentiometer).
Everything works great, Stealthchop, SpreadCycle, Interpolation .. But the sensorless homing I can not activate at all!
I tested it with Marlin versions 1.1.8, bugfix-1.1.x and bugfix-2.0.x. In none of them can I activate sensorless homing detection.
My M122 comes out as follows:
My endstops and TMC configuration looks like this:
I did a test running the StallGuard TMC2130 Sketch and I connected an LED to the DIAG1 and the GND of the Ramps, but when the motor starts to turn the LED is already on and the terminal does not change any value even if I put some pressure on the motor shaft. Even if I change the STALL_VALUE to 63 the same happens. Any value I put in STALL_VALUE does not affect the behavior at all.
I have now updated the Arduino lib from the TMC2130 to version 2.4.3 and also had the same behavior.
Does anyone have any light or tips to give me what else can I test?
Thanks in advance for your help.
Configuration bugfix-1.1.x.zip
Thank you, Rodrigo Sclosa.