 mh-dm
commented
3 weeks ago
mh-dm
commented
3 weeks ago Now looking at changes with S_CURVE_ACCELERATION.
Before
I've marked the issues with red - it's mostly deceleration going abruptly to 0 instead of smoothly.
There's a bit of speed dependent measurement noise (most obvious on the right, just ignore it) since my current logic analyzer is limited to capturing at 2Mhz.
After
Aside/Commentary
Of the times I've tried S_CURVE_ACCELERATION it never was a clear improvement. If comparing the two after graphs it's a bit more clear why:
- it spends a lot of time at ~0 acceleration for which it has to compensate by going up to 2x or more of the acceleration limit (the or more is referring to the ~10 step segment with off the charts acceleration)
- it performs poorly for a series of short segments that are full-ac/deceleration: see red triangle vs red 'tree'
There's also the issue that as soon as there's significant jerk/deviation allowed (therefore ~instant axis speed changes), the speed smoothness is gone. Maybe a new approach could be:
- go from 6th derivative ('pop' limited, 5th order bezier) curve down to a compute/simplicity friendly 4th derivative ('snap' limited, 3rd order bezier)
- start curve at say ~0.2x acceleration then from there go up to only ~1.2x the limit
- or maybe start at the implied acceleration from the jerk/deviation. The axes have different instant jerks while there's only a single global acceleration, so there needs to be some averaging or min-squared-error to compute the 'right' implied acceleration. I might actually experiment with this.
Anyway, the important part is this change also improves S_CURVE_ACCELERATION a bit.
 thierryzoller
thierryzoller thisiskeithb
thisiskeithb thinkyhead
thinkyhead tombrazier
tombrazier sjasonsmith
sjasonsmith
Description
Fix rounding directions in
calculate_trapezoid_for_block(). Fix off-by-ones errors in ac/deceleration steps inblock_phase_isr(). Half-initializeac/deceleration_timeto smooth the speed change shock that happens between segments, which is critical as jerk/deviation further adds to the shock.Requirements
Affects all.
Benefits
The result is a smoother motion profile that follows the imposed acceleration limits with a well defined 0.5-1.5x error factor (or up to 2x if axis is starting from ~0). Errors are due to converting a real-valued motion profile into discrete numbers of steps. Fixes are general and improve
S_CURVE_ACCELERATIONtoo (no endorsement implied).Enjoy the smoother motion or use more aggressive acceleration/jerk/deviation values for faster prints.
Before
Here's a logic analyzer capture for the X axis before the change showing massive acceleration peaks (highlighted in red):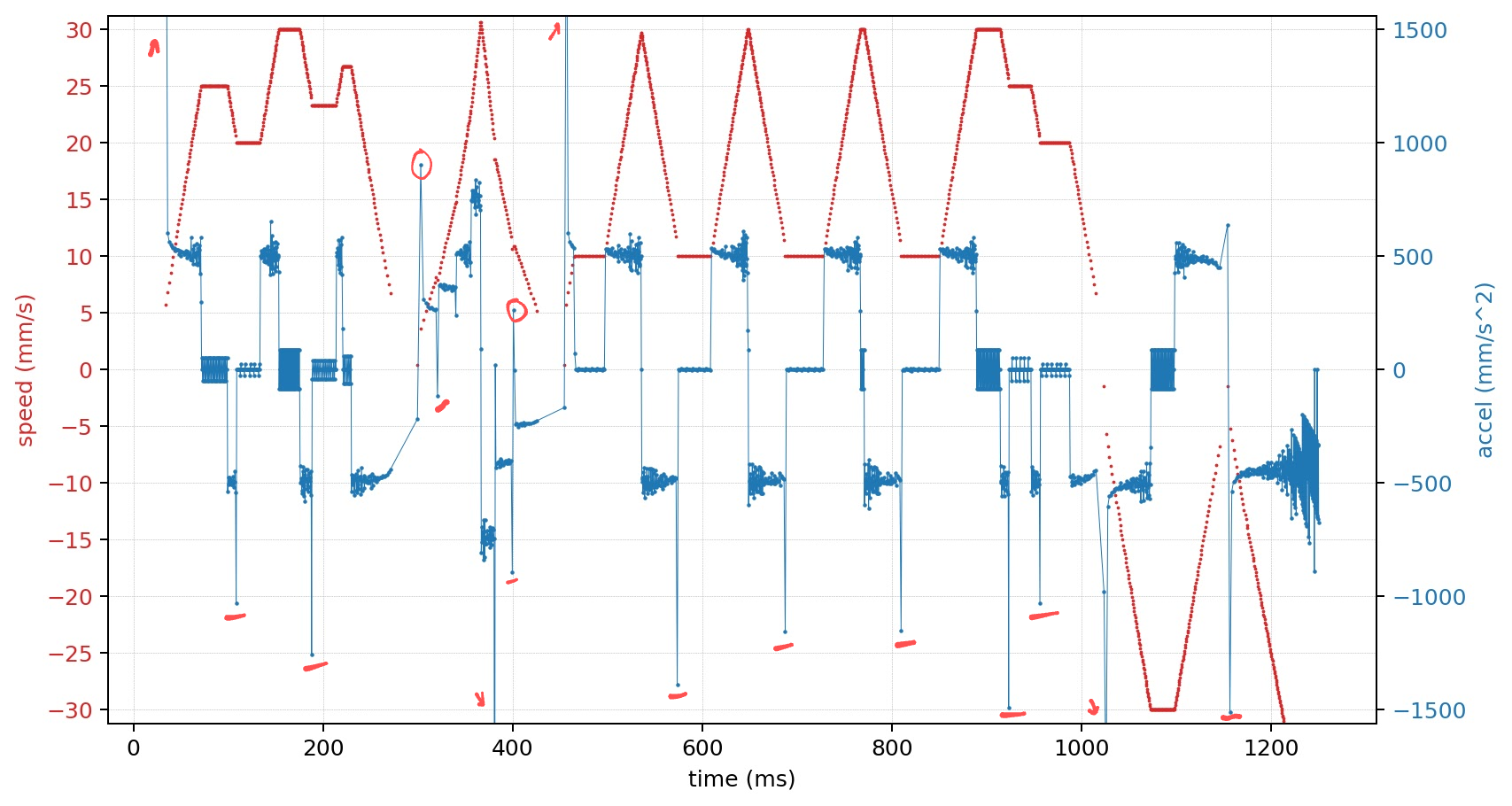 There's a bit of speed dependent measurement noise (most obvious on the right, just ignore it) since my current logic analyzer is limited to capturing at 2Mhz.
There's a bit of speed dependent measurement noise (most obvious on the right, just ignore it) since my current logic analyzer is limited to capturing at 2Mhz.
After
After, the peaks are gone/significantly reduced. Furthermore many times when switching between accel to plateau to decel the acceleration change happens over 2 steps instead of 1 (highlighted with green checkmarks). This means smoother motion / reduced jolt: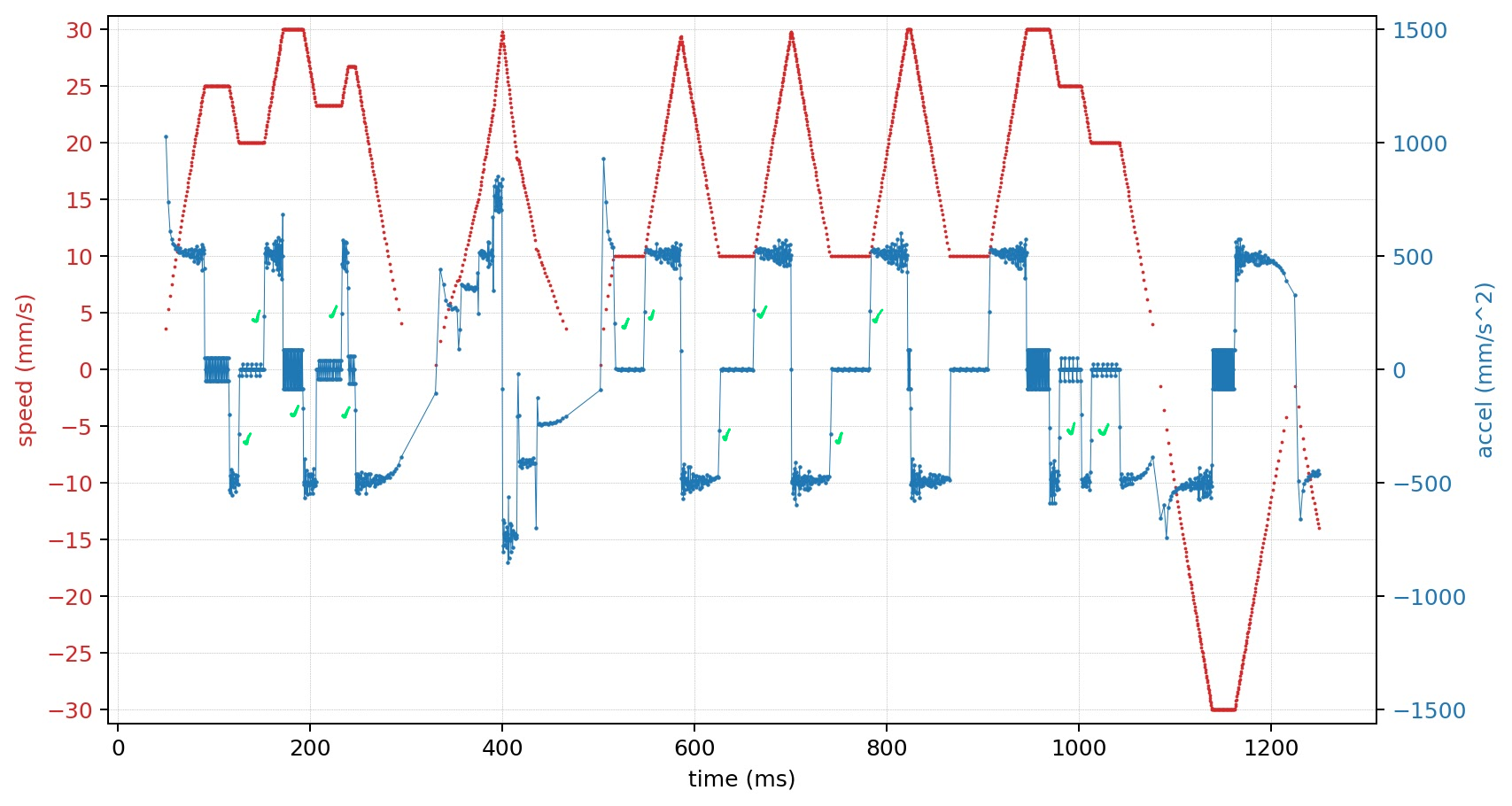
Configurations
Tested by looking at the generated step/dir impulses with a logic analyzer. Tested with low jerk so it doesn't muddy the picture.
Here's the gcode for these captures:
Related Issues
12491
20277 due to added
NOMORE(initial_rate, block->nominal_rate);sanity limits