 MyLab-odyssey
commented
7 years ago
MyLab-odyssey
commented
7 years ago Hi casainho!
Please give some more details about the hardware of your project. a) There are two versions of the Arduino Pro mini - one 8MHz with 3.3V and one with 5V @ 16MHz. Which one do you use? b) What is the CAN transceiver you use? You can't connect the output of the MCP2515 directly to the car OBD port!!! Please use a MCP2551 when using a 5V MCU or a MCP2562 on 3.3V systems. c) Did you follow the connection diagram correctly (for the OBD port / diagnostics port)? d) Please use a example sketch and test for correct initialization of the MCP2515 CAN controller.
 casainho
casainho jim-sokoloff
jim-sokoloff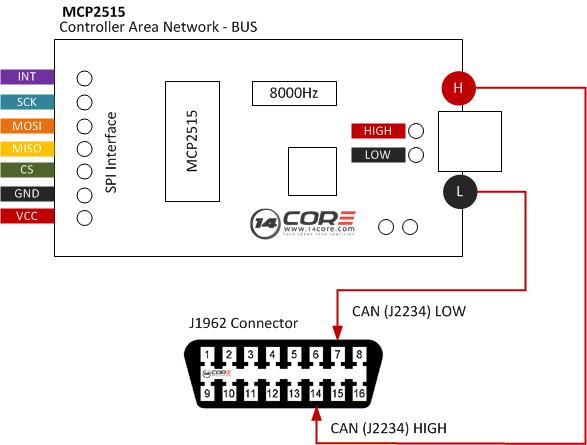{kind=link}
Hi. Thank you for making this project!!
I put and Arduino Pro Mini + a cheap MCP2515 together. The first issue I had was because I wired CAN_H and CAN_L exchanged -- I verified with oscilloscope and corrected. Now I connect on my Smart ED and the dashboard seems to keep reseting but at sometime says something like "workshop fault brake" or such. Any ideas what could be wrong? The signals of CAN_H e L seems to be ok.
This is the output:
[03:03:05:699] --- ED Battery Management Diagnostics --- [03:03:05:711] --- v0.5.6 --- [03:03:05:711] ----------------------------------------- [03:03:05:711] Connect to OBD port - Waiting for CAN-Bus [03:03:05:724] .CONNECTED [03:03:06:709] ----------------------------------------- [03:03:12:715] Reading dataF#0F#1F#2F#3F#4F#5F#6F#7 [03:03:42:764] ----------------------------------------- [03:03:42:773] Time [hh:mm]: 00:00, ODO : 0 km [03:03:42:773] ----------------------------------------- [03:03:42:786] SOC : 0.0 %, realSOC: 0.0 % [03:03:42:786] HV : 0.0 V, 0.00 A, 0.00 kW [03:03:42:786] LV : 0.0 V [03:03:42:786] ----------------------------------------- [03:03:42:786] ENTER command... (? for help)