 MyNameIsCosmo
commented
5 years ago
MyNameIsCosmo
commented
5 years ago Try adjusting the values in the Dynamic Reconfigure starting with the filtered cloud and cluster sizes.
Also check the output of the lidar_body_tracking node in your terminal. You may need to pass --screen to the end of your roslaunch command.
 yashspatel09
yashspatel09
 left bottom is rostopic list after running Quanergy ros driver only and right bottom is after running lidar_body_tracking roslaunch
left bottom is rostopic list after running Quanergy ros driver only and right bottom is after running lidar_body_tracking roslaunch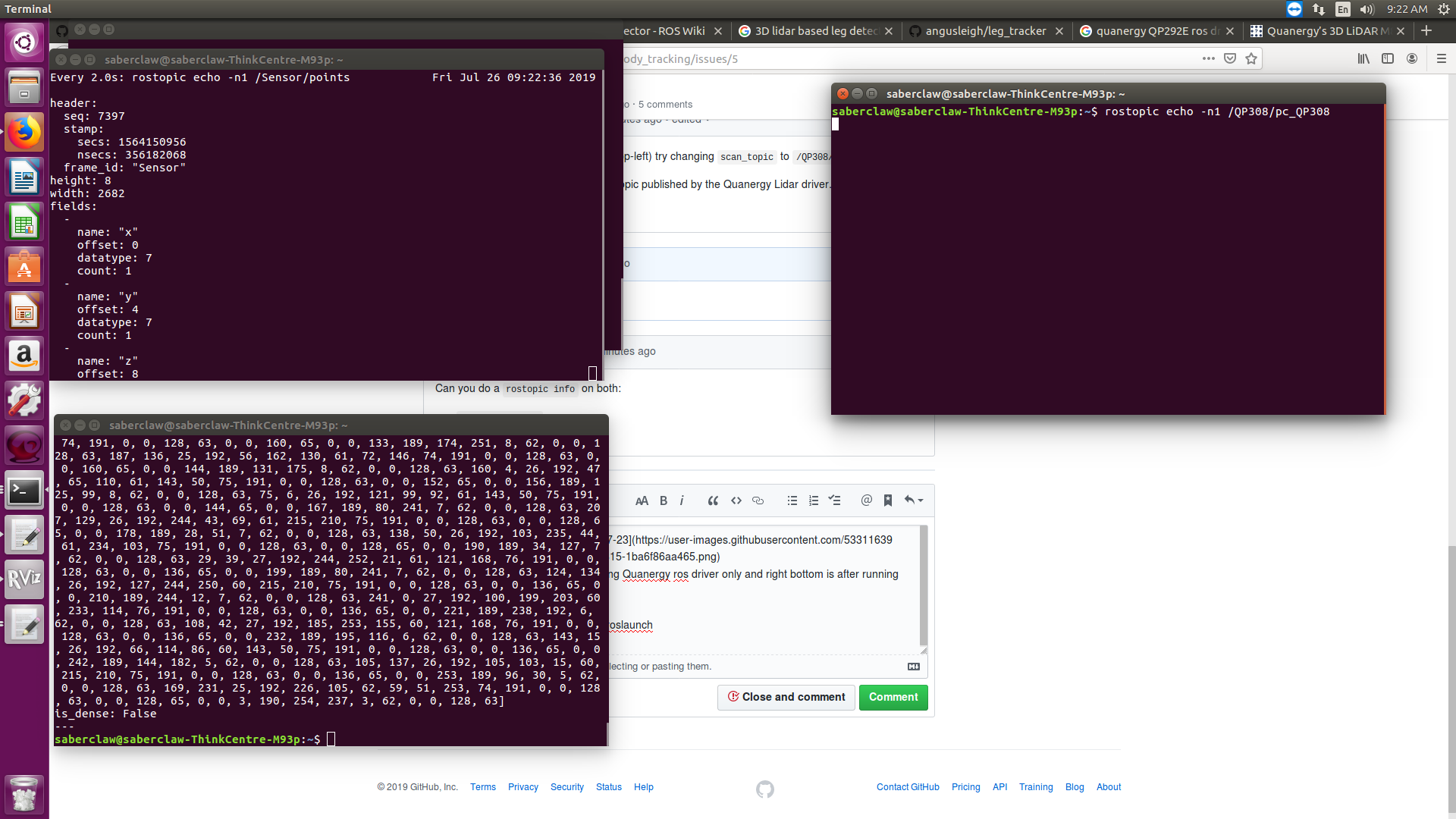
 Well something silly mistake is been getting on for sure/
Well something silly mistake is been getting on for sure/
Hey I was able to get the display by changing topic name. Now how do I get person tracking working. Seems when I try to check rostopic for filtered and clustered topics they are not publishing anything. Guide me where am I going wrong. I am initializing m8 lidar using Quanergy_client_ros. Is that a problem? or do I have any other option. @MyNameIsCosmo