 dzalkind
commented
2 years ago
dzalkind
commented
2 years ago Hi, this looks like an issue with the ROSCO controller that we addressed here.
What version of the ROSCO controller are you using and what model/DISCON.IN file are you using?
 BenoitSchiltz
BenoitSchiltz ptrbortolotti
ptrbortolotti
Hi all,
I am tuning my controller using ROSCO toolbox, and when I plot my operational points coming from steady wind simulations statistics, I see that when peak shaving applied (less than 20% load reduction) the TSR is changing (rotor speed slope lower than what should be) from where peak shaving is used, which is not desired. I reduced and increased my rated wind speed in the yaml file, but it did not change the controller behavior at operational points where there is peak shaving.
Is there a way to ensure that before reaching rated rotor speed the TSR is kept constant, so that peak shaving is applied only by changing the pitch angle? Cf picture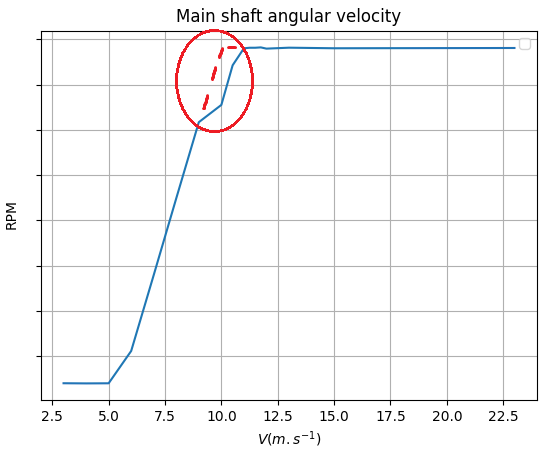
Thanks Best regards