wenbowen123
commented
3 weeks ago
wenbowen123
commented
3 weeks ago I checked your logs. The object is moving too fast at 1714129813249. Your camera frequency is not fast enough.
Open KomputerMaster64 opened 1 month ago
wenbowen123
commented
3 weeks ago I checked your logs. The object is moving too fast at 1714129813249. Your camera frequency is not fast enough.
 KomputerMaster64
commented
3 weeks ago
KomputerMaster64
commented
3 weeks ago Thank you for the response. I will check for better camera hardware. Do you recommend performing actions at a slower pace? I have been using the Depth Camera D435i - Intel RealSense. I will be testing FoundationPose with the Depth Camera D455 - Intel RealSense.
wenbowen123
commented
3 weeks ago did you check how much fps is the camera images? The upper bound of realsense is 30hz, but sometimes it could be lower than that. In the video, you are ejecting the cube to perform free-form sliding, that moment the motion is really big.
This is in continuation of the Issue #83
Hi @wenbowen123
I am sorry for the delayed response. I ran the experiments with values for
track_refine_itervariable ranging from2to50, however it was observed that the tracking invariably drifted towards the end samples (last 15 to 20 percent of the video). I would be delighted to share the files.Regards, Prabhav
__ Edit: I am sharing the failure case for the case with
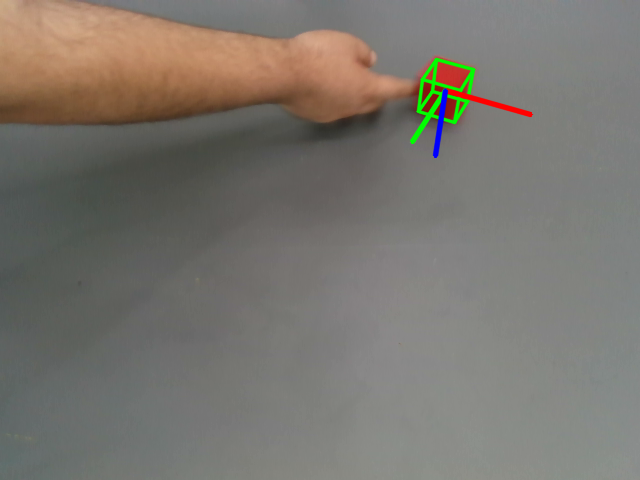
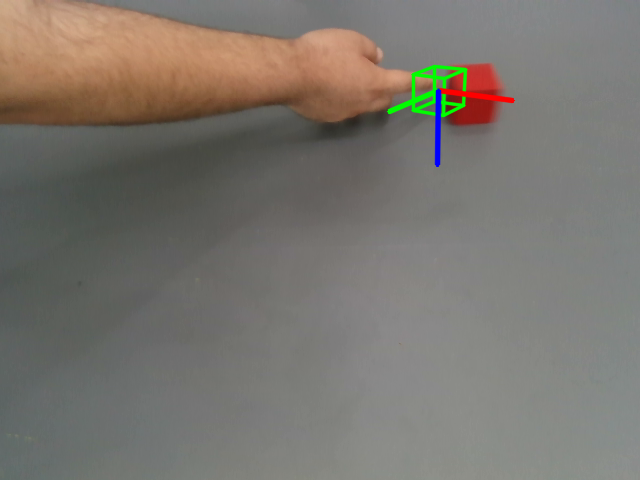
track_refine_itervariable set to50.Remarks: For the shown case, the tracking failure happends towards the end of the samples. The tracking is optimal till image
1714129813249.pngi.e. for the first410samples (Total of619image samples).Additional Remarks: This is an improvement it to the first case where
track_refine_itervariable was set to2, and the tracking was optimal only upto the157image samples.I have uploaded the new
FoundationPose_demo_05_eri-5_tri-50.zipfile here (this is corresponding to thetrack_refine_itervariable set to50) in the Google Drive Folder.Question/Note: The total size of the debugging directories for the 49 experiments is 7 GB. It would be great if you could confirm if it is required to share all of the experiments' files.
__ The last frame with the correct tracking (top), and the frame after which the trakcing was not optimal (bottom).