 ZisongXu
commented
4 weeks ago
ZisongXu
commented
4 weeks ago By the way, about the results, we can get the object pose in camera. Can you tell me the coordinate frame of the camera. Because I need to convert the object pose in camera to object pose in world frame so I can use this system.
If I'm not mistaken, the z-axis of the camera is looking towards the photo, the y-axis is down, and the x-axis is to the right
 wenbowen123
wenbowen123
Hi Dear, I have a question about the coordinate frame of the result of the target object.
This is the model I feed into the FoudationPose system, and we can see the coordinate frame clearly.
But what I get in the result is: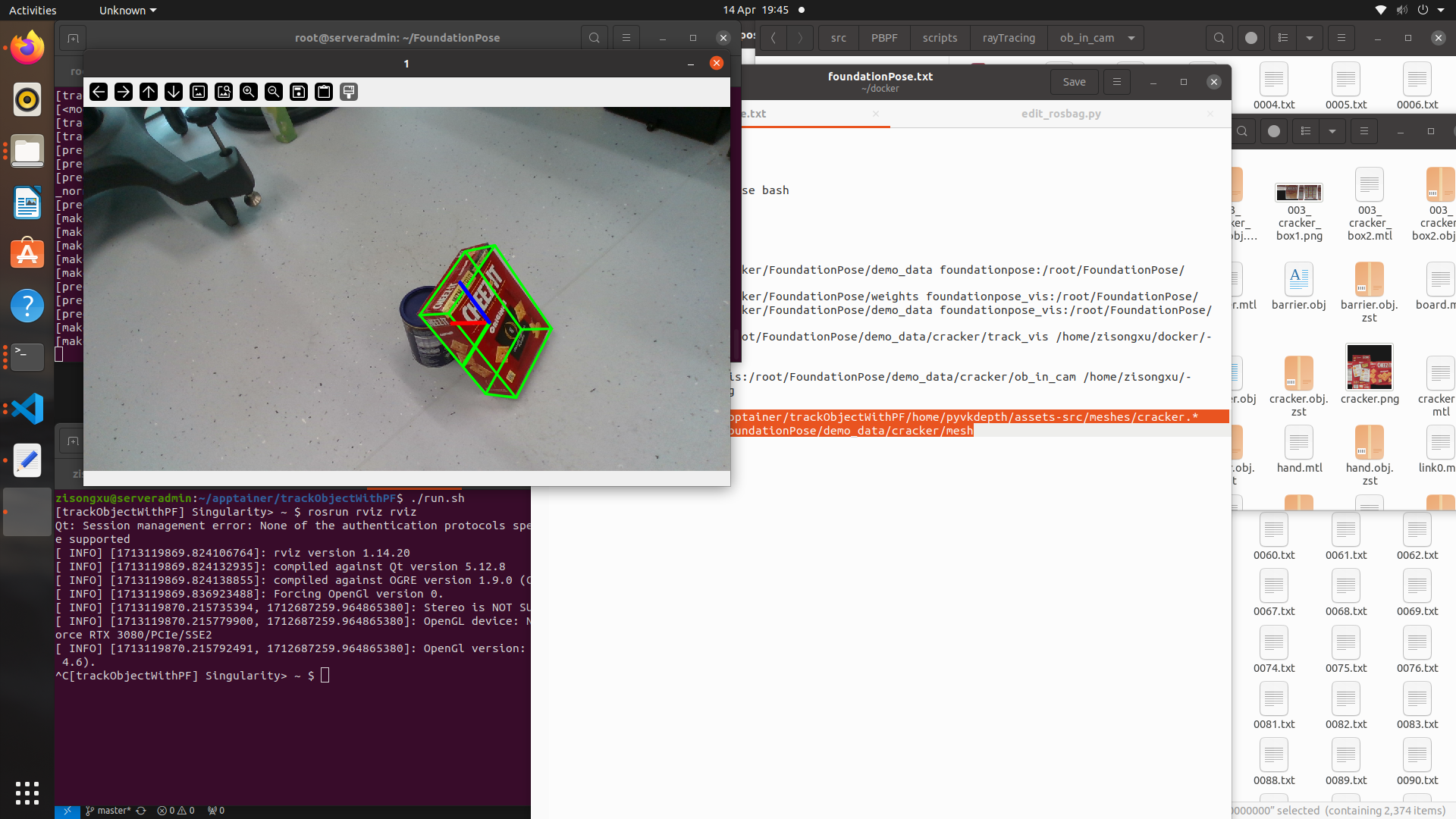
We can see the difference between the coordinate frame of .obj model file and the coordinate frame of result.
And I also check the example you provided, this is the model:
This is the result:
Also different, is that right or should I set the coordinate frame some where before running FoudationPose system?
Thanks a lot! Best Regards Zisong XU