 NicHub
commented
6 months ago
NicHub
commented
6 months ago Hi Jesse, nice job. In order to check your wiring, can you scan your i²c bus with this:
https://github.com/NicHub/i2c_scanner
The scanner should say:
Scanning I2C bus...
0x41
0x52
Number of I2C devices found: 2 Jesseforeman3825
Jesseforeman3825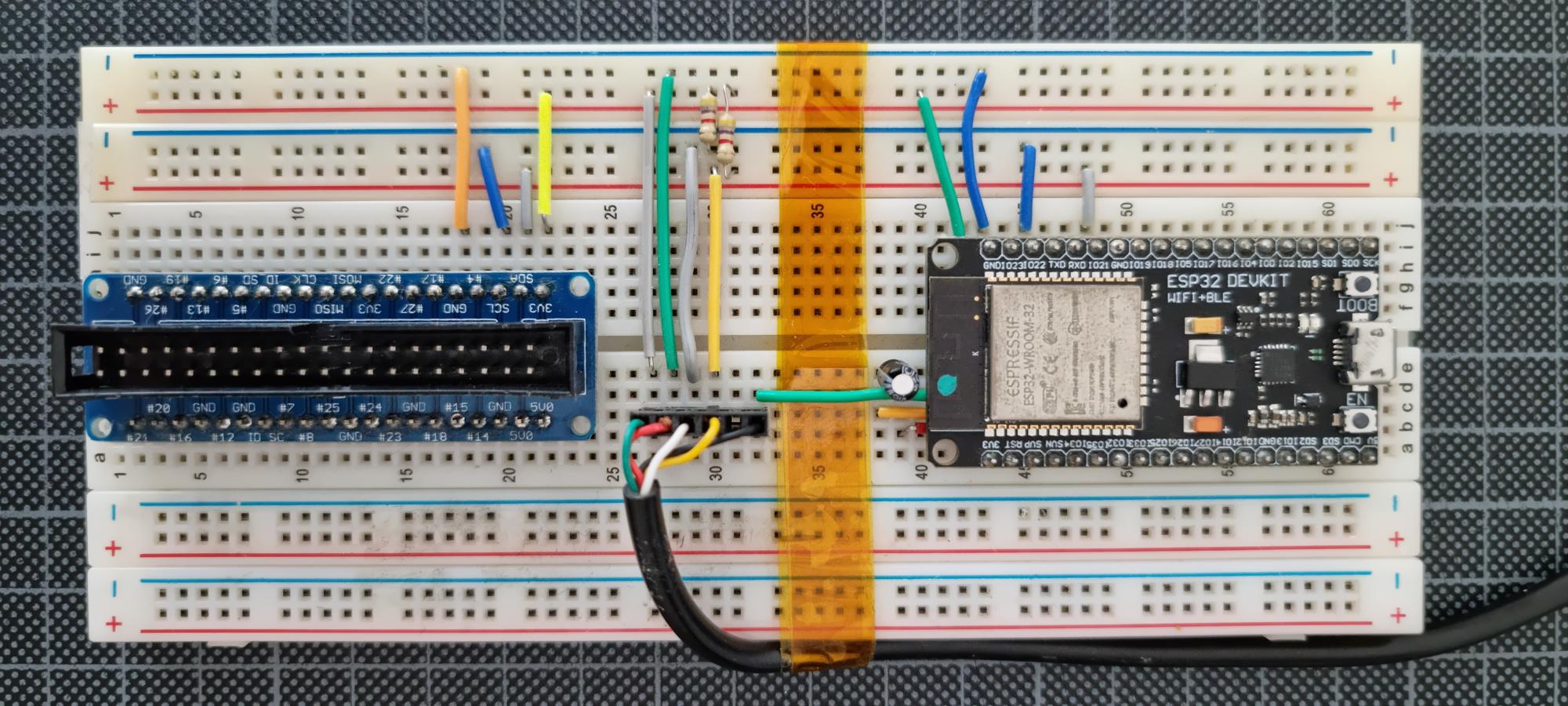{kind=link}
{kind=link}
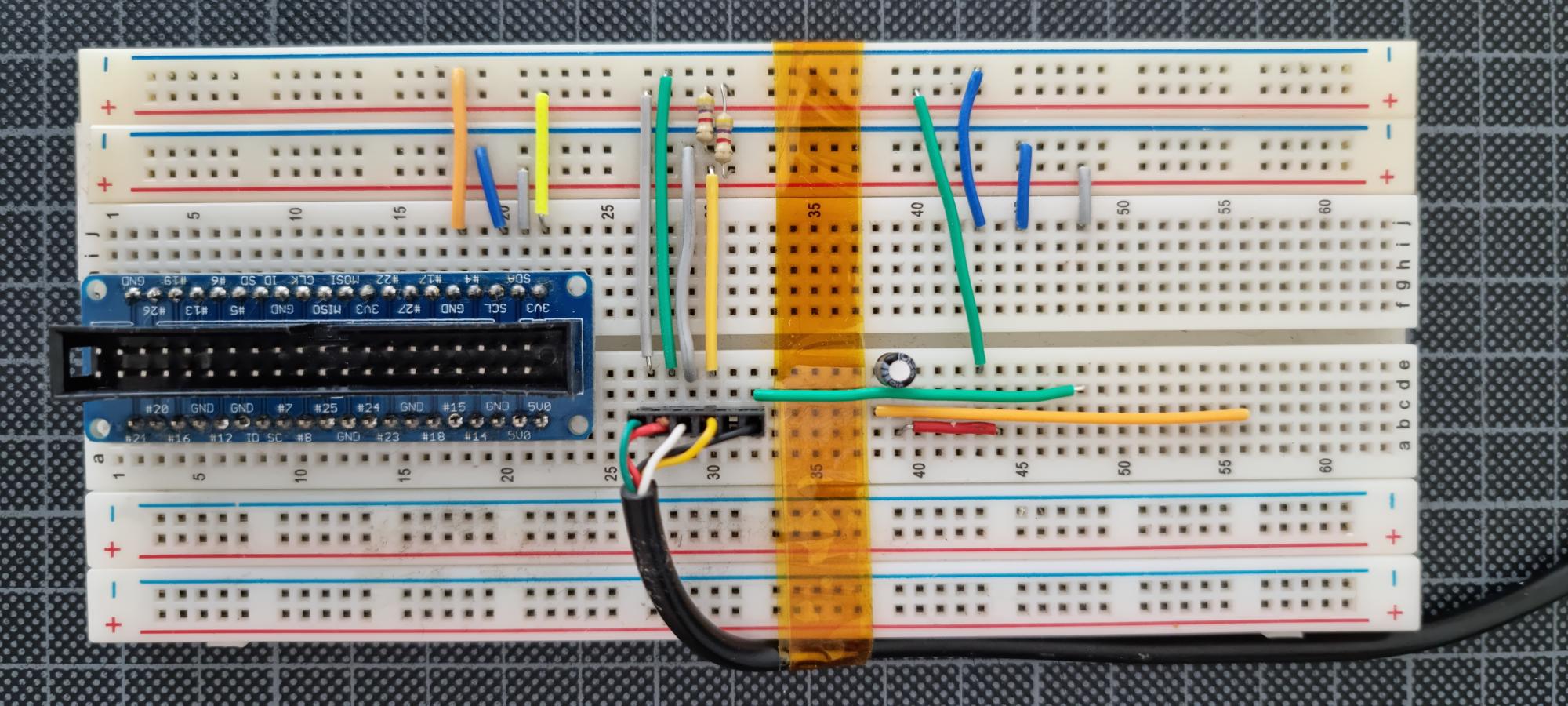
Thanks for offering to help! I’ve been at this for days. I didn’t know if I would be able to reach you. I have been reading through the code and can’t for the life of me figure out what I’m doing wrong. Here is a picture of the lay out on the breadboard I tried to mimic what you setup as close a possible. I changed the colors of the nunchuck wires plugging into the board when I soldered on my leads for connecting to the breadboard. That way I was easier for me to tell where the wires needed to go. The only thing in the code that comes up highlighted in yellow after compiling is this MLPrintLog and a few things related to that. But it still uploads. When I power the esp32 with a usb cable and power the pwm driver (5v 10a) it doesn’t move or home. I’m so glad you reached back out to me. thank you so very much!! Maybe with your help I’ll be able to get this going.



 ![Uploading image.jpg…]()
![Uploading image.jpg…]()