 NicolaBernini
commented
5 years ago
NicolaBernini
commented
5 years ago Goal
Develop a pipeline connecting
- Input: Point Cloud as BEV RGB Map
- Obtained as preprocessing
- RGB means just 3 channels image, encoding:
- 1) height from the ground
- 2) laser ray intensity
- 3) density (resulting from spatial discretization)
- Output: Detection Results (Bounding Box + Semantic Label)
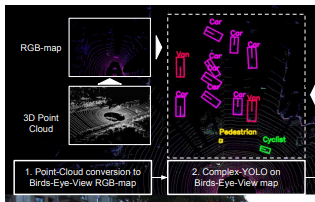
- From the Paper Fig1
Related Work
- Used for
- Classification
- Parts Segmentation
- Semantic Segmentation
Overview
Complex-YOLO: Real-time 3D Object Detection on Point Clouds
Arxiv: https://arxiv.org/abs/1803.06199