 kjetilkjeka
commented
7 years ago
kjetilkjeka
commented
7 years ago @pavel-kirienko I think I'm close to suggesting a complete system for versioning. This will be the foundation for accepting bit-compatible frames. Take a quick look before I remove the WIP tag (one of the upcoming days) and say if you see contradictions or unspecified behaviour.
 pavel-kirienko
pavel-kirienko thirtytwobits
thirtytwobits








Summary
Instead of talking about DSDL versions and stabilization of DSDL as a whole, this RFC suggests the alternative of versioning data types individually. This will ease the task of stabilization, allowing it to happen sooner, giving a more flexible way to describe compatibility between DSDL, and enabling a way to accept bit compatible data types without freezing data type signatures [#4]. Some robustness is also gained by having ways to check if single frame data types have conflicting definitions.
Motivation
There is an obvious need to stabilize DSDL. Every time a message is changed every software depending on it breaks. There is also a need to not prematurely stabilize. Being stuck with badly functioning data types will be the consequence, and it won't be fixable until next major version.
With the current system (waiting for dsdl 1.0) no stabilization is realistically within reach. For every battle proven data type, there is a data type that is not yet ready as well. By keeping on adding data types when it is convenient a dsdl stabilization is further pushed in the future as well.
By accepting separate versioning of data types, these problems should be much easier to handle. The proven parts of dsdl can be stabilized while allowing rapid development of the non-stabilized parts. This also allows software that only relies on stable messages to be stabilized, this is a huge advantage for uavcan users.
The data type signatures are really great! They let you know when you're using the same data types, and even enforce this programmatically for multi frames. The problem is that when you do have a miss match, it's not trivial to find out which unit is erroneous. Separate versioning of data types give us tools to talk about the version of the messages. For instance, if a unit (outside our control) states that it sends 0.2 frames and we know that we currently accept 0.3 frames, we will be much closer to fix the problem. It will also make it possible to (non-automatically) detect different single frame transfers, this would not otherwise be noticed as no CRC is used.
There are a lot of things that can go wrong when stabilizing DSDL. By stabilizing one data type at a time we make eventual "screw ups" less possible and more handleable. By combining this with using gained knowledge from previous stabilizations to stabilize new data types, stabilization should have a much lower chance of causing headaches.
Explanation
The approach to versioning is based upon the proven idea of semantic versioning but adapted to make sense for dsdl. The version information is encoded directly in the name of the file where the definition is contained such as
<ID>.<Name>.<Major version>.<Minor version>.uavcan. For example341.NodeStatus.1.0.uavcanExamples
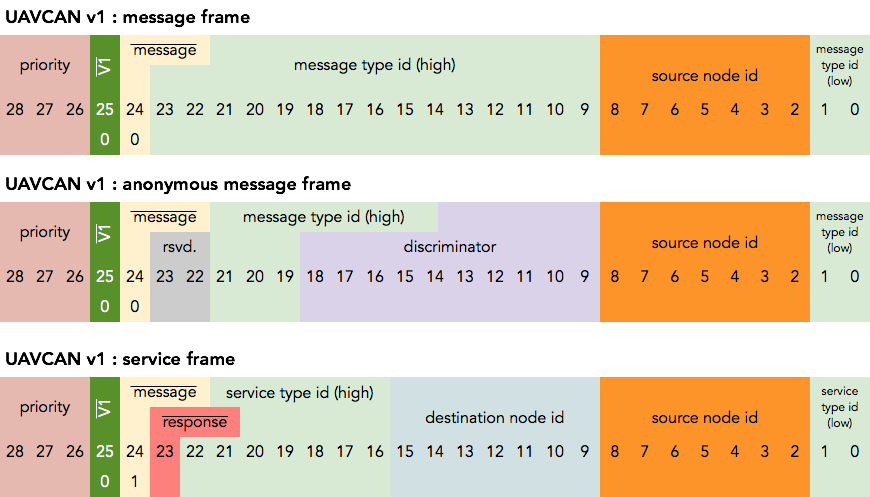
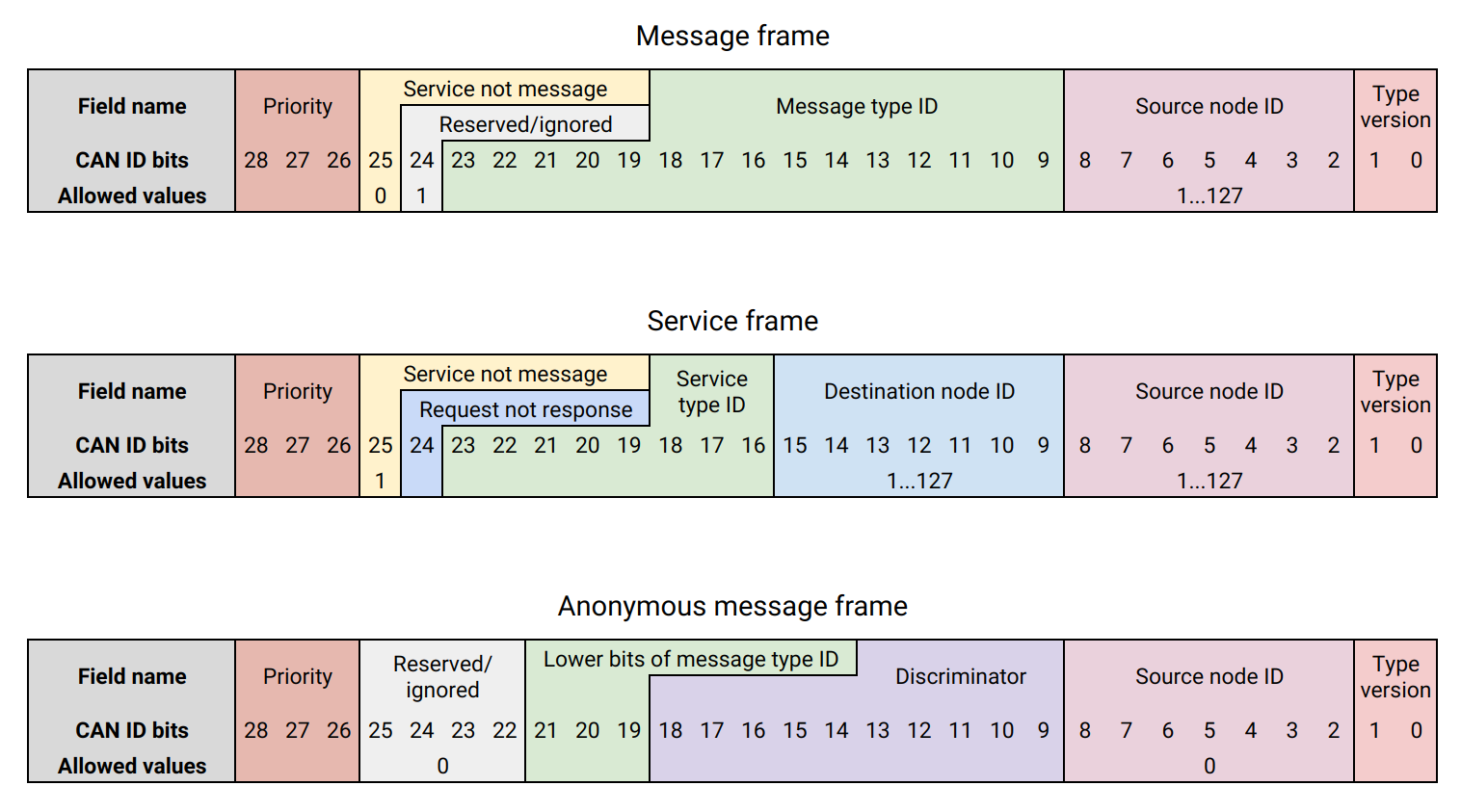
Let's use the following frame as an example
If we were to add a comment we would have to increment the minor version (this doesn't change data type signature nor bit compatibility)
In the same way, adding constants would only require an increment of the minor version
But removing/changing a constant would require a major version (since it breaks backward compatibility)
Changing the name of fields or constants would not retain code compatibility and will also require a major version increment.
Removing/editing a comment will both keep data type signature and code compatibility, thus only requiring minor version increment
Using new fields in a bit compatible way or changing the name of void fields only require a minor version update.
Implementation
This feature should be regarded as a low impact feature. The feature itself will not change the generated code. Meaning that by treating files without version as 0.0 (and forbidding explicit version 0.0) this change will be fully backward compatible. This means that for example
341.NotStatus.uavcan"really" means341.NodeStatus.0.0.uavcan, while explicitly writing341.NodeStatus.0.0.uavcanwill result in an error.Open questions
How do we handle versioning of data types that uses other data types?
In some way or another we will have to specify the exact version the data type is dependent on. One way to do this would be as following
Another alternative would be
The following rules must be adopted
Further work