 qiaozhijian
commented
1 year ago
qiaozhijian
commented
1 year ago Code is as follows.
import os
import json
import tensorflow._api.v2.compat.v1 as tf
import numpy as np
import open3d as o3d
from waymo_open_dataset import dataset_pb2 as open_dataset
import cv2
tf.enable_eager_execution()
class OpenLane(object):
def __init__(self, dataset_dir):
self.dataset_dir = dataset_dir
def fetch_data(self, segment, timestamp):
gt_json = os.path.join(self.dataset_dir, 'lane3d_1000/training', segment, '{}.json'.format(timestamp))
with open(gt_json, 'r') as fp:
gt_dict = json.load(fp)
image_path = os.path.join(self.dataset_dir, 'images', gt_dict['file_path'])
img = cv2.imread(image_path)
lane_all = []
for lane in gt_dict['lane_lines']:
xyz = np.asarray(lane['xyz']).reshape(3, -1).T
lane_all.append(xyz)
lane_points = np.vstack(lane_all)
return img, lane_points
def visualize_pcd(points):
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(points)
o3d.visualization.draw_geometries([pcd])
def lanemap(filename, openLane_dir):
dataset = tf.data.TFRecordDataset(filename, compression_type='')
segment = filename.split('/')[-1].replace('.tfrecord', '')
openLane = OpenLane(openLane_dir)
world_frame = None
lane_map = []
for cnt, data in enumerate(dataset):
frame = open_dataset.Frame()
frame.ParseFromString(bytearray(data.numpy()))
timestamp = "{:<018}".format(frame.timestamp_micros) # openlane seems to use 18 digit
image0 = next(c for c in frame.images if c.name == open_dataset.CameraName.FRONT)
calibration = next(cc for cc in frame.context.camera_calibrations if cc.name == image0.name)
ex0 = np.array(calibration.extrinsic.transform, dtype=np.float32).reshape(4, 4)
vechile_pose = np.array(image0.pose.transform, dtype=np.float32).reshape(4, 4)
cam0_pose = vechile_pose @ ex0
img, lane_points_c = openLane.fetch_data(segment, timestamp)
# lane_points_c = lane_points_c[lane_points_c[:,0]<20]
if world_frame is None:
world_frame = cam0_pose
T_wc = np.linalg.inv(world_frame) @ cam0_pose
lane_points_w = lane_points_c @ T_wc[:3, :3] + T_wc[:3, 3].reshape(1, 3)
# visualize_pcd(lane_points_c)
lane_map.append(lane_points_w)
lane_map = np.vstack(lane_map)
visualize_pcd(lane_map)
if __name__ == '__main__':
# Replace this path with your own tfrecords.
filename = '/media/qzj/Extreme SSD/datasets/waymo/raw_data/segment-9568394837328971633_466_365_486_365_with_camera_labels.tfrecord'
openLane_dir = '/media/qzj/Extreme SSD/datasets/OpenLane/'
lanemap(filename, openLane_dir)
 RicardLee
RicardLee
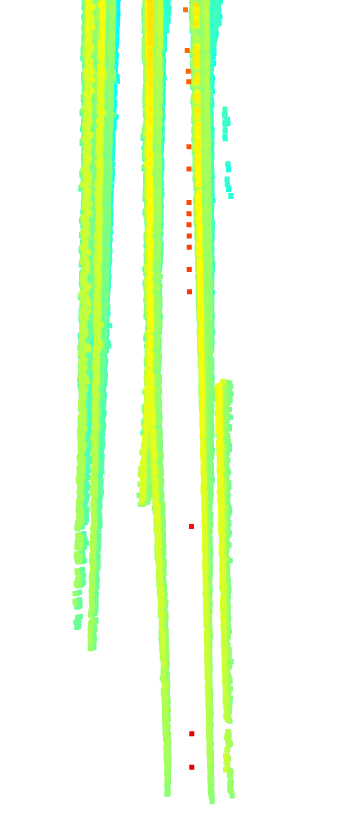
I accumulate the 3D lane GT using pose provided by origin waymo dataset. I find there is a serious blur of accumulated 3D submap in the segment(segment-9568394837328971633_466_365_486_365_with_camera_labels). Let's look at the first small section of this submap. There are even some outliers such as red points.
Let's look at the first small section of this submap. There are even some outliers such as red points.
 For easy understanding, the corresponding images are as follows
For easy understanding, the corresponding images are as follows

I think there are two ways to improve the quality of map: First, use only the closer lane points. For example, 20m