 Jaeyoung-Lim
commented
1 year ago
Jaeyoung-Lim
commented
1 year ago @lshums16 You can see in the log that you are having estimator problems that might be related how you are providing optitrack information to the vehicle.
Few things that comes to mind:
- Have you checked the frame convensions? The default convention of ROS is ENU, while PX4 uses NED
I am not sure EKF would automatically translate this if the frame is not defined as
POSE_FRAME_NED. @bresch @dagar As far as I can see this is not the case?
- Also, your visual odometry seems to have some issues with the timestamps

 ajordan5
ajordan5
 mengchaoheng
mengchaoheng ripdk12
ripdk12 junwoo091400
junwoo091400
Describe the bug
We are attempting to fly in position mode with an Optitrack motion capture system as a prerequisite to flying offboard. The drone flies just fine with manual control, but when we switch to position control we are seeing jittery motion that makes the drone motion unstable. We have been using the motion capture page on PX4 (https://docs.px4.io/main/en/ros/external_position_estimation.html) and have also used this issue as reference.
Here are our current parameters:
EKF2_AID_MASK = 2 EKF2_EV_CTRL = 11 EKF2_EV_DELAY = 0.0ms (haven't been able to calibrate this through log files yet) EKF2_EV_NOISE_MD = EV noise parameters EKF2_HGT_REF = Vision EKF2_IMU_CTRL = 1 EKF2_MAG_DECL = 0.0 deg EKF2_MULTI_IMU = 3 EKF2_MULTI_MAG = 3
Like the previously mentioned issue, we wrote a ROS2 node that takes the Optitrack data and publishes it to the PX4 micro_dds bridge topic /fmu/in/vehicle_visual_odometry. It is publishing at 100 Hz, and changing this does not seem to change the strange behavior that we are seeing.
We are using the following: PX4-Autopilot (main): commit 93ba7de0c3b82507720c6fbbe9d1953217c4722d px4_msgs (main): commit b6eebbfa5350f7bd0969944255db9384a0182d39
Log Files and Screenshots
Here is the Flight Review link from our latest log: https://review.px4.io/plot_app?log=6c279b1a-6d66-44c8-8c09-3e53e4514f0d
Here is a screenshot of /fmu/in/vehicle_visual_odometry: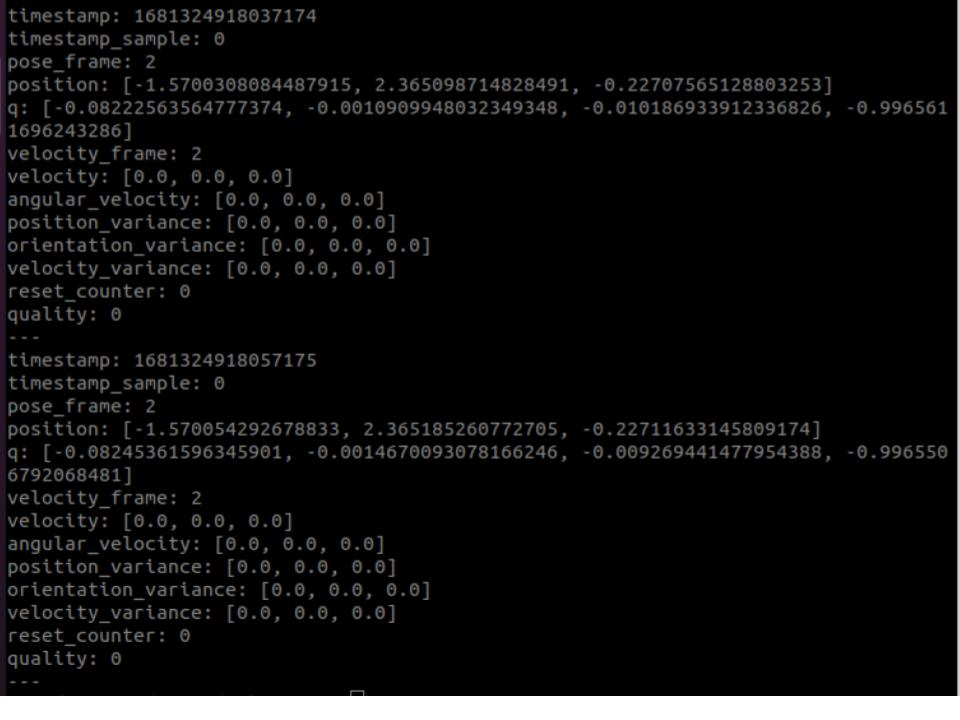
Drone (please complete the following information):