 dagar
commented
8 years ago
dagar
commented
8 years ago Has this ever worked for you? Did you select the HIL plane airframe? When you press connect in QGC does the map location match xplane? Are you able to arm from RC?
Closed ruyi7952 closed 5 years ago
dagar
commented
8 years ago Has this ever worked for you? Did you select the HIL plane airframe? When you press connect in QGC does the map location match xplane? Are you able to arm from RC?
 ruyi7952
commented
8 years ago
ruyi7952
commented
8 years ago Airframe: SIM-XPlane , QGC location ok, with xplane 10.51r1 , XPlane 10.45/10.50 map error, Yes arm 。
dagar
commented
7 years ago @ruyi7952 can you try this again with latest PX4 and QGC? I believe it's working again.
 zthorson
commented
7 years ago
zthorson
commented
7 years ago I am seeing the same issue attempting an HIL simulation using a pixhawk board with no sensors, actuators, or RC connected. I have disabled all circuit breaker checks, which allows me to arm.
This is for a fixed wing simulation.
Symptoms
Hardware:
Software/Firmware:
zthorson
commented
7 years ago I found the issue. It is very specific to PX4FMU_V4 hardware builds. The bug is related to a workaround to flaky boards was put in place in https://github.com/PX4/Firmware/commit/021f0840ae7f724bfdfd317dda3d57362017b835 about 8 months ago.
Basically, if you are using Pixracer (or variants thereof), when you attempt to enter HIL mode, the code meant to reset the sensors leaves the fmu driver running. This uses up the /dev/pwm_output0 file structure, preventing pwm_out_sim from registering to it, causing the simulated pwm not to run. This resulted in the simulator not being able to control throttle or other control surfaces.
I am going to look into having the sensor_reset call to the px4fmu driver shut down and clean up after the lines have been reset. I can't think of a case where you would want the sensor_reset command to leave the fmu driver running, since it gets fully configured in a later step of the rcS script anyway.
@ruyi7952 I will try to get a pull request in next week, but if you would like to try it on your hardware sooner, I can send you a firmware file with the changes.
ruyi7952
commented
7 years ago Thanks for your (@zthorson) reply. I am using: Futaba T18SZ with firmware version 2.0, X Plane 10.51r2, QGroundControl Tried 3.1.3, PX4 Firmware: 1.6.0dev (Master), PixHawk v2.4.7 with PX4FMU_V2 (Not PX4FMU_v4).
my computer runing windows 7 pro sp1 and macos 10.12. The same problem, no progress.I was dizzy …… Sorry for the inconvenience.Could you send me for your parameter file?
 fernandourrets
commented
7 years ago
fernandourrets
commented
7 years ago Hello!!!! I've the same problem's Ruyi7952!!!! Please help me out!!!!! I'm working three days ago!!!! I'm so tired, please!!!!!!!!!!!!!!!! I don't want to give up!!!!! I just want to use the simulator!!!! Thanks a lot for your answer. Fernando
dagar
commented
7 years ago @fernandourrets have you tried PX4 master?
fernandourrets
commented
7 years ago Hello Dagar!!! Nice to meet you, not really, where can i download that Firmware???
fernandourrets
commented
7 years ago I can Arm from my RC in the HIL but the throtlle, yaw, roll and pitch doesn't respond and if i make a Mavlink inspector the RC channels responding very well!!!! thks again
dagar
commented
7 years ago First make sure you have the latest QGroundControl (http://qgroundcontrol.com/downloads/). Then go to the firmware tab under settings to flash the latest PX4, except select Advanced and look for master.
fernandourrets
commented
7 years ago The Qgroundcontrol version is v3.1.3 and the firmware that i have available is PX4 standard version (stable), beta testing (beta) or Developer Build (master)
fernandourrets
commented
7 years ago Done!!!! The master firmware is loaded....1) i must to calibrate all the sensors with Plane airframe and then switch to Simulation Hilstar (xplane)??????
fernandourrets
commented
7 years ago I made everything with Master firmware but every time the accel, gyro, mag, etc became descalibrated, i can't do nothing!!!! Hellllllllp!!! Thanks
fernandourrets
commented
7 years ago I must to go back and reload the Beta Firmware!!!! I can Arm by my RC Spectrum DX7 but doesn't respond the throttle, yaw, roll and pitch, if i select the Analyze function in the Widgets, select the rc channels and responds ok!!!!! I don't know what to do!!!!! Thanks again
 TheRibbonRed
commented
7 years ago
TheRibbonRed
commented
7 years ago @fernandourrets if you're still after HIL, you might wanna check out PX4 Flight Stack version 1.5.5. It works completely with HIL. It seems the ver 1.6.5 has another HIL bug in it that's yet to be resolved.
You can find the previous versions of PX4 Flight Stack on its GitHub: https://github.com/PX4/Firmware/releases
fernandourrets
commented
7 years ago Thank you so much!!!! I'll check out this version and then will tell you if works!! Fernando
2017-08-23 1:20 GMT-03:00 TheRibbonRed notifications@github.com:
@fernandourrets https://github.com/fernandourrets if you're still after HIL, you might wanna check out PX4 Flight Stack version 1.5.5. It works completely with HIL. It seems the ver 1.6.5 has another HIL bug in it that's yet to be resolved.
You can find the previous versions of PX4 Flight Stack on its GitHub: https://github.com/PX4/Firmware/releases
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-324216864, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4N7QcTVEmsXGVzPYtJ2ThulyP4u1ks5sa6iagaJpZM4KUwZF .
 1MSG1
commented
7 years ago
1MSG1
commented
7 years ago @TheRibbonRed confirming that it's still inoperable. I'm able to arm (after lots and lots and lots of finessing it) but initiating a sequence in QGCS is impossible. Throttle locks to 50% and control surfaces don't respond to inputs.
TheRibbonRed
commented
7 years ago @1MSG1 did you try loading the PX4 Flight Stack version 1.5.5 manually? Via "custom firmware" option? The PX4 team already made the .px4 firmware and zipped it, all you have to do is download from the GitHub and choose the firmware that suits your board.
As far as I know, the 1.6.5 version still has HIL bugs.
1MSG1
commented
7 years ago Yes, tried that and it worked. For context I spent three days going mad trying to figure out what I was doing wrong - it's 100% worth a note somewhere (without having to dig through pull requests) that HIL on the latest version is inoperable - really frustrating that it wasn't documented in a way that's standard.
On Fri, Sep 1, 2017 at 1:54 AM TheRibbonRed notifications@github.com wrote:
@1MSG1 https://github.com/1msg1 did you try loading the PX4 Flight Stack version 1.5.5 manually? Via "custom firmware" option? The PX4 team already made the .px4 firmware and zipped it, all you have to do is download from the GitHub and choose the firmware that suits your board.
As far as I know, the 1.6.5 version still has HIL bugs.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-326495397, or mute the thread https://github.com/notifications/unsubscribe-auth/AeB3wOtpOvvy54r_CM9D1OZBKUStgStPks5sd5wRgaJpZM4KUwZF .
-- Matt George P: (650) 434-3123 E: m@mattgeorge.co
Please feel free to schedule a call at any time (no need to ask first!) using the scheduler at Mattgeorge.co/call. http://mattgeorge.co/call
 macfly1202
commented
7 years ago
macfly1202
commented
7 years ago Hi, I'm still looking for HIL with last px4 firmware. Same issue as describes above. I successfully run HIL mode with PX4 1.5.5 but mission loading doesn't work aka activating "mission" after waypoint sync put the HIL UAVin "land" mode. Does anybody know the last "more" complete/running firmware version of Hil mode ?
thanks
1MSG1
commented
7 years ago Hey Jean -
I gave up on and moved over to Q Ground Control which works ok in HIL.
On Wed, Sep 13, 2017 at 1:28 AM Jean-Marie Prigent notifications@github.com wrote:
Hi, I'm still looking for HIL with last px4 firmware. Same issue as describes above. I successfully run HIL mode with PX4 1.5.5 but mission loading doesn't work aka activating "mission" after waypoint sync put the HIL UAVin "land" mode. Does anybody know the last "more" complete/running firmware version of Hil mode ?
thanks
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-329063059, or mute the thread https://github.com/notifications/unsubscribe-auth/AeB3wKIU0p-eZ4Lq2UWFAdQjoX2ceFsZks5sh2fxgaJpZM4KUwZF .
-- Matt George P: (650) 434-3123 E: m@mattgeorge.co
Please feel free to schedule a call at any time (no need to ask first!) using the scheduler at Mattgeorge.co/call. http://mattgeorge.co/call
macfly1202
commented
7 years ago @1MSG1 : I'm speaking about qgroundcontrol : it's what I use ! Have you sucessfully load waypoint/run mission from qgroundcontrol ? In my case, each attempt hil uav go to land mode.
1MSG1
commented
7 years ago If you revert back to the older firmware does that solve the issue? Put differently, have you tried to flash a new SD card with the older firmware?
On Wed, Sep 13, 2017 at 8:06 AM Jean-Marie Prigent notifications@github.com wrote:
@1MSG1 https://github.com/1msg1 : I'm speaking about qgroundcontrol : it's what I use ! Have you sucessfully load waypoint/run mission from qgroundcontrol ?
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-329147001, or mute the thread https://github.com/notifications/unsubscribe-auth/AeB3wLmxaPU5jh0HeT6RlamfLOvykR2gks5sh8U6gaJpZM4KUwZF .
-- Matt George P: (650) 434-3123 E: m@mattgeorge.co
Please feel free to schedule a call at any time (no need to ask first!) using the scheduler at Mattgeorge.co/call. http://mattgeorge.co/call
macfly1202
commented
7 years ago Sorry for late answer - miss message. So I successfully run HIL mode with PX4 1.5.5 but mission loading doesn't work aka activating "mission" after waypoint sync put the HIL UAVin "land" mode. What do you mean with "tried to flash a new SD card with the older firmware?" I flashed my pixfalcon with px4 1.5.5 and Hil basic command works with X plane 10 but impossible to launch a mission after sync : go directly to landing.
fernandourrets
commented
7 years ago Hello!!!! I'm sorry for my delay, i can't find the "PX4 Flight Stack version 1.5.5 firmware" , i thank you so much if you could put the firmware link on Github!!!!! Thank you so much. Fernando
2017-09-01 2:54 GMT-03:00 TheRibbonRed notifications@github.com:
@1MSG1 https://github.com/1msg1 did you try loading the PX4 Flight Stack version 1.5.5 manually? Via "custom firmware" option? The PX4 team already made the .px4 firmware and zipped it, all you have to do is download from the GitHub and choose the firmware that suits your board.
As far as I know, the 1.6.5 version still has HIL bugs.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-326495397, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4LVJfTsYiq4SmrGF1zXgnZO9qxZwks5sd5wRgaJpZM4KUwZF .
fernandourrets
commented
7 years ago Hello TheRibbonRed!!!! Firstly thank you so much for your answer, could you send me by email the link to download the "PX4 Flight Stack version 1.5.5 firmware"???? I can't find it, thank you again. Fernando
2017-08-23 1:20 GMT-03:00 TheRibbonRed notifications@github.com:
@fernandourrets https://github.com/fernandourrets if you're still after HIL, you might wanna check out PX4 Flight Stack version 1.5.5. It works completely with HIL. It seems the ver 1.6.5 has another HIL bug in it that's yet to be resolved.
You can find the previous versions of PX4 Flight Stack on its GitHub: https://github.com/PX4/Firmware/releases
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-324216864, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4N7QcTVEmsXGVzPYtJ2ThulyP4u1ks5sa6iagaJpZM4KUwZF .
macfly1202
commented
7 years ago 1.5.5 is directly access with QGroundControl . In load firmware section choose ´advanced mode’ and load 1.5.5?instead of latest. Really simple. I don’t remenber exact term but I think it’s advanced mode... on the right below the standard px4 firmware choose menu . Hope it help!
fernandourrets
commented
7 years ago thanks for answer this email. I send attached by email the pic that i touch when i want to upgrade the firmware. Doesn't appear 1.5.5 option. Thanks again, Fernando from Córdoba Argentina
El 17/10/2017 17:43, "Jean-Marie Prigent" notifications@github.com escribió:
1.5.5 is directly access with QGroundControl . In load firmware section choose ´advanced mode’ and load 1.5.5?instead of latest. Really simple. I don’t remenber exact term but I think it’s advanced mode... on the right below the standard px4 firmware choose menu . Hope it help!
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-337364526, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4BDnCEMkCeEnrGrUadTGRF76tckRks5stRFZgaJpZM4KUwZF .
fernandourrets
commented
7 years ago thanks for answer this email. I send attached by email the pic that i touch when i want to upgrade the firmware. Doesn't appear 1.5.5 option. Thanks again, Fernando from Córdoba Argentina
2017-10-17 17:43 GMT-03:00 Jean-Marie Prigent notifications@github.com:
1.5.5 is directly access with QGroundControl . In load firmware section choose ´advanced mode’ and load 1.5.5?instead of latest. Really simple. I don’t remenber exact term but I think it’s advanced mode... on the right below the standard px4 firmware choose menu . Hope it help!
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-337364526, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4BDnCEMkCeEnrGrUadTGRF76tckRks5stRFZgaJpZM4KUwZF .
macfly1202
commented
7 years ago Hi, I check this morning And seem that I mistake. You true : you could download px4 firmware 1.5.5 here: https://github.com/PX4/Firmware/releases. Choose the *.zip, download it, unzip and load as Custom firmware.
fernandourrets
commented
7 years ago Thanks a lot macfly1202!!!!!! It works!!!! i'm fighting with other things in QGC but the firmware issue is done!!!! Thanks again. Fernando
macfly1202
commented
7 years ago @Fernando, I’m happy for you! If px4 dev team could solve the HIL issue in latest release, it will be nice.
fernandourrets
commented
7 years ago Hi everyone once again!!!!!! I could use Qground Control on Hil simulator mode with Xplane 10, i have setup on my RC three flight modes...1-manual mode 2- mission mode and 3- stabilize mode, when i take off in manual mode the plane fly almost good...but finally fly (the engine or propeller sometimes turn off) then when i switch to mission mode by my rc the qgroungcontrol display and the voice say...mission flight mode and the plane goes to the first waypoint until the plane in the xplane10 doesn't respond and crash!!!!!! Have you got any idea???? Summary...the qgroundcontrol responds good but not the xplane 10 in mission mode!!!! Thks again. Fernando!!!!
2017-10-25 2:09 GMT-03:00 Jean-Marie Prigent notifications@github.com:
@Fernando https://github.com/fernando, I’m happy for you! If px4 dev team could solve the HIL issue in latest release, it will be nice.
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-339216191, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4Ou82Hb9vD0ywjuF3SYe4Np0utPGks5svsKjgaJpZM4KUwZF .
macfly1202
commented
6 years ago Hi, I make a short trial again with qgroundcontrol 3.3.0 and PX4 latest stable. HIL still broken, no RC command. I try the old firmware 1.5.5 and wasn't working anymore. Everything seems to be ok - arming ok - gps ok but I ve got no RC command it seems...Thottle, gyro do nothing. My hardware is CUAV Pixhack Nano with px4v4 fmu. I check if joystick was activate instead RC command but this wasn't the case. Qgroundcontrol display some error incompatibility between Qground and firmware when dsiplay safety menu... 1.5.5 is really really old.
Why using HIL and Xplane ? I want to remind me the fly mode and make a remind in memory of mission in HIL before go flying - it's why I want to use X plane and HIL... It's sad that HIL still not working with Xplane because it's simple for windows plateform. For sure I could go to linux and run Gazebo but it's too complicated for simply play with flight mode and mission. I'm really use to do this with Arduplane and SITL and it's work well.
Will dig further soon with other hardware....
 LorenzMeier
commented
6 years ago
LorenzMeier
commented
6 years ago @dagar Are you using this setup?
macfly1202
commented
6 years ago Thanks LorenzMeier. I test with Pixfalcon, PX4 FMU V2 1.5.5 stable, perfectly working with hilstar. Will test with latest build stable on this hardware now.
macfly1202
commented
6 years ago I confirm even on PX4 FMU V2, latest stable build have no RC command in HIL mode. I haven't V1(is it still exist?) and V3 to test...
So only PX4 V2 FMU on 1.5.5 is working as now.
I love to test, seriously, don't hesitate to ask me ! Thanks !
macfly1202
commented
6 years ago fyi PX4 V2 FMU is sucessfully tested with xplane 11, like 10, same setup. Hil config Receive rate reach 37Hz (max), avg 31Hz on my config (versus 19 Hz max on xplane 10).

 acfloria
commented
6 years ago
acfloria
commented
6 years ago The problem is that the mixer is missing. The mixer was accidentally deleted just before the v1.6.4 release. I added it again but that was after the last stable release. So you either should use the master branch or add that mixer to the code, build and flash then that version. In our group we are using X-Plane for HITL simulation. On a good enough computer it will run but you will need data at about 100 Hz otherwise the estimator will complain. To increase the data rate you should decrease the graphics options (such as visibility, cloud details,....) in X-Plane and deactivate vsynch in your graphics driver.
macfly1202
commented
6 years ago Congrats for reactivity @acfloria
Ok with travis master build at this day: RC command are working on px4 v4 under HIL now.
About Xplane, I'm using all max details and option (:-)) in general ...
I will try to desactivate option like you suggest but normally I have a quick powerfull graphic card I use for Deep Learning : nvidia 1080ti with suffisant ram (64gb) and 6 cores dual @ 3.2Ghz ... It must be sufficiant. Graphic renderer send back info to qgroundcontrol as you seem to suggest ?I have a look here https://dev.px4.io/en/simulation/hitl.html trying to understand what is slowing the system : UDP ? Will test you suggestions.
Thanks a lot !
macfly1202
commented
6 years ago Another feed back : RC command are working on px4 v4 under HIL (master dev build) ...but there is no stabilization mode. All stabilized and auto mode crash plane (stabilzed, position, altitude, ). Like if there is no gyro. Checkbox 'Enable sensor level HIL' and 'Use newer actuator format' is checked. Same setup Rc link, xplane10 on px4 v2 stable haven't got this issue and perfectly working. So there is still an issue. sorry about that.
acfloria
commented
6 years ago Can you check if acc/gyro data arrives on PX4 and the estimator converged? In addition what is the data rate you get currently?
macfly1202
commented
6 years ago There is some data. cf screenshot. I redo a RC calibration (after tested beta build that wasn't ok because asking sensor calibration) and that seem to have fight the major issue. But there is still a big lag. My major concern is more than it's perfectly working with px4v2 and behaviour really different on px4v4.
I'm not PX4 devops so do my best to answer your question.
accel

gyro
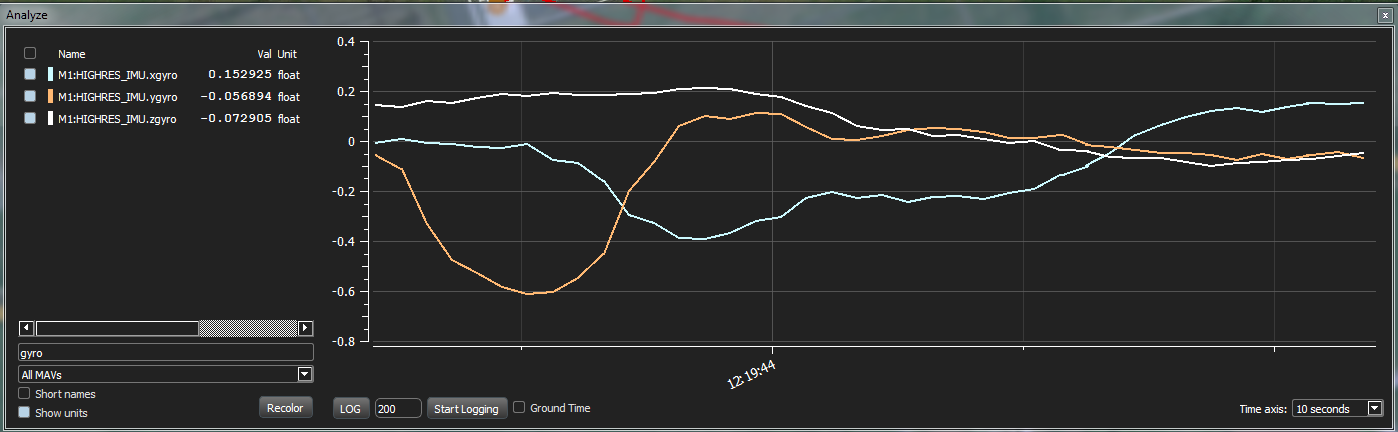
Rate seem good > 100

Qgroundlogfile *.log of this sensors during short xplane session with manual to stabilized mode 20180315_13h35_px4fmuxplane_issue.log
acfloria
commented
6 years ago Actually the log file from the pixhawk would help more than the QGroundlogfile. One thing I can spot is the Mag0 fail Timeout warning which most probably is pointing out an issue of the estimator.
I don't have a v4 on hand so I do not know why it might work worse than v2.
macfly1202
commented
6 years ago Could it be hardware related (my CUAV pixhack nano) ?
Here the log extract from SD for this session (normally, it's not my local time log so not sure but seem to time of Xplane offset, I didn't notice before they are linked)
here : https://logs.px4.io/plot_app?log=61c08dd8-3f96-4913-b88f-ddfc0b6a9310
[EDIT] will add log valid soon, previous is incomplete.
acfloria
commented
6 years ago On the plane the data only arrives at around 25 Hz, this definitely will cause the estimator to diverge. I suspect that it is an issue of QGC not relaying the data fast enough and producing dropouts. At least that happens when in our case when HIL fails. So I think at least the issue is not caused by your hardware alone although it could contribute to it a little as you say for v2 it works better.
macfly1202
commented
6 years ago Log (Fail simulation) file for this error on Pixhack Nano Px4 fmu v4 : this time logs are ok
https://logs.px4.io/plot_app?log=bf2ce9c1-6ea5-4bcc-8155-a29de77da9dc
[EDIT:] The 3d Flight path log visualizer is AMAZING ! congrats for devs who create this wonderful tool. It's clearly visualize what happen in plane attitude especially with 'Camera tracks vehicule'. We clearly see how attitude is bad (an the difficulty I have to maintain it) https://logs.px4.io/3d?log=bf2ce9c1-6ea5-4bcc-8155-a29de77da9dc
macfly1202
commented
6 years ago Log (sucessful simulation) file for Pixfalcon px4 fmu v2 with Xplane and Hilstar
fernandourrets
commented
6 years ago Hi, firstly i'm sorry my delay!!!!! I tried and it works using Qground Control software / Simulation Plane / HilStar (xlpane), Firmware 15.5
If you want i can send to you the features on xplane 10 simulation software
I hope has been helpful!!!! Fernando
2017-04-23 12:23 GMT-03:00 Daniel Agar notifications@github.com:
@fernandourrets https://github.com/fernandourrets have you tried PX4 master?
— You are receiving this because you were mentioned. Reply to this email directly, view it on GitHub https://github.com/PX4/Firmware/issues/5651#issuecomment-296450730, or mute the thread https://github.com/notifications/unsubscribe-auth/Aanf4GYqTWQJgtLQLyXUCmXM9Lbu6_cOks5ry2zsgaJpZM4KUwZF .
HW: PixHawk 2.4.7 CUAV Clone FW: Standard X-Plane 9.70 / 10.51r1
I have read http://www.pixhawk.com/users/hil to do this one.
BTW,No Throttle No Ailerion No Elevator No Rudder in X-Plane, I can ben sure my RC on air ,The ground station is correct 。
why?