AndronikosKostas
commented
2 months ago
AndronikosKostas
commented
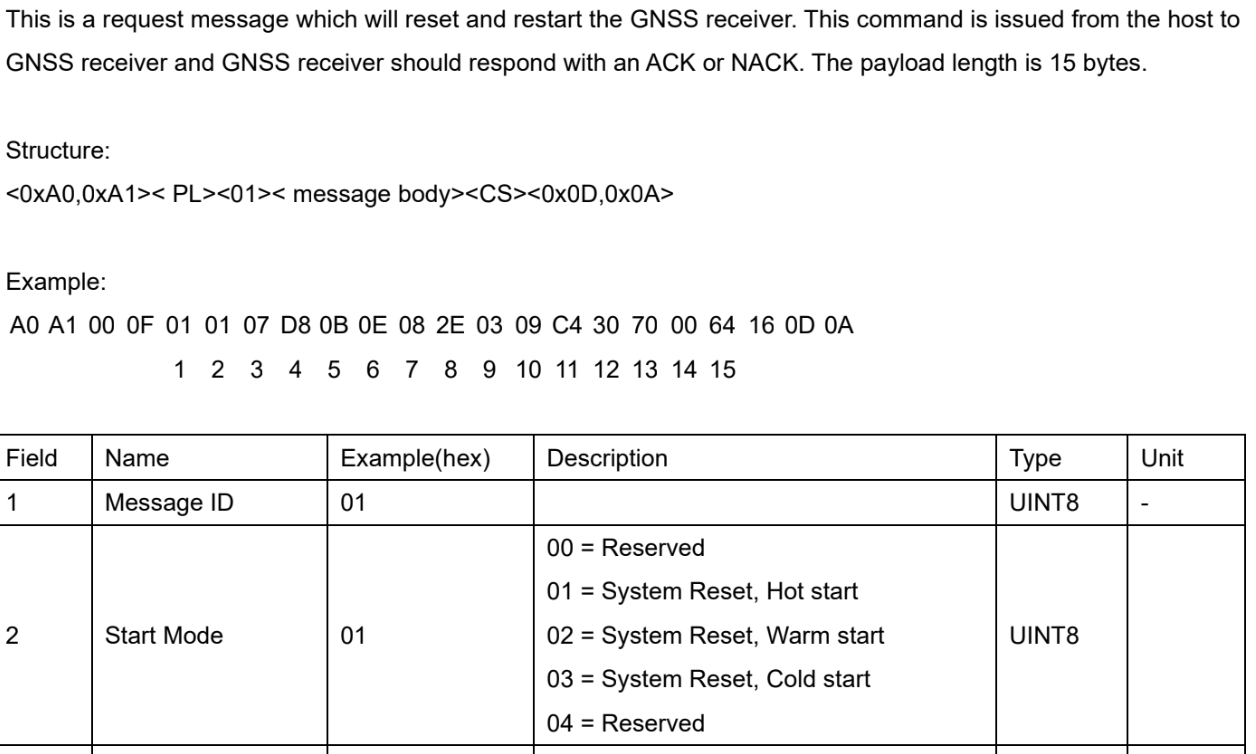
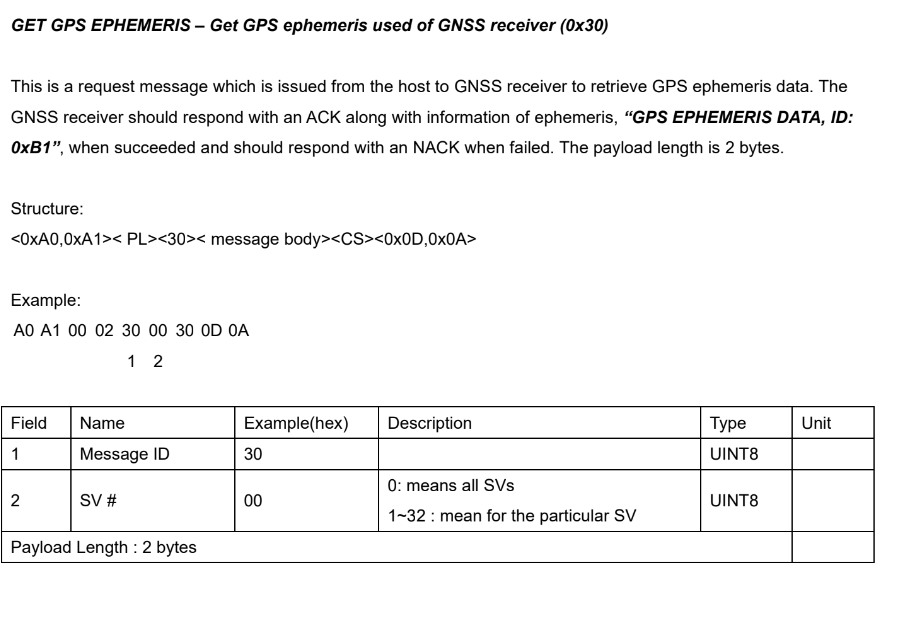
2 months ago - Find and understand at a good level all the documentation of the GNSS module ( datasheet etc )
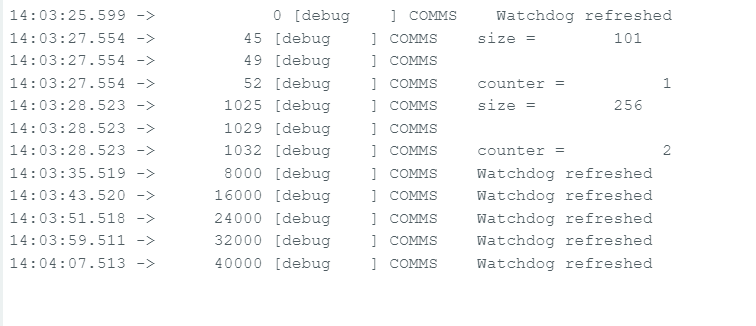
- Run a simple code at the EQM to identify what works and what does not work at the GNSS
- When you complete the above step you can go to the second part of the issue which is the Testing
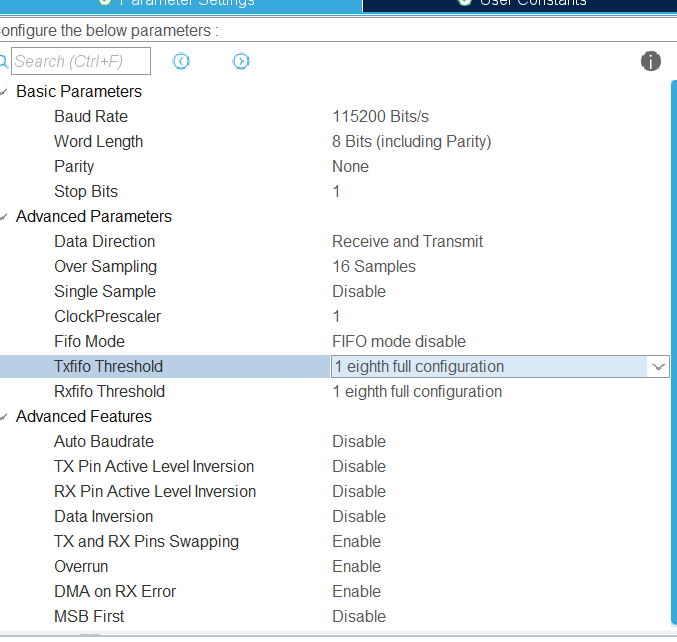
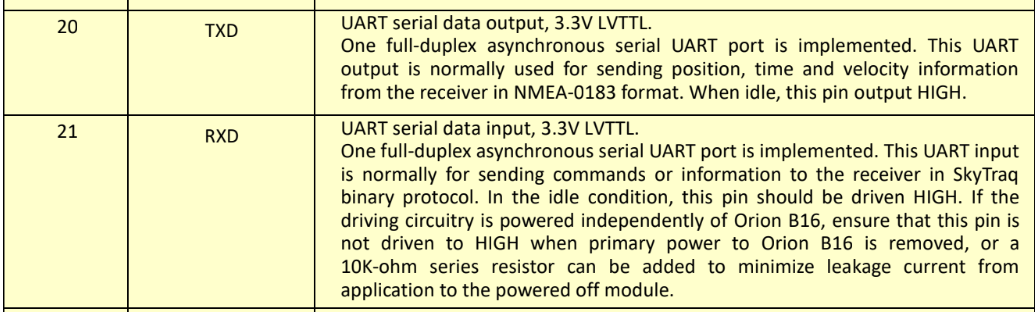
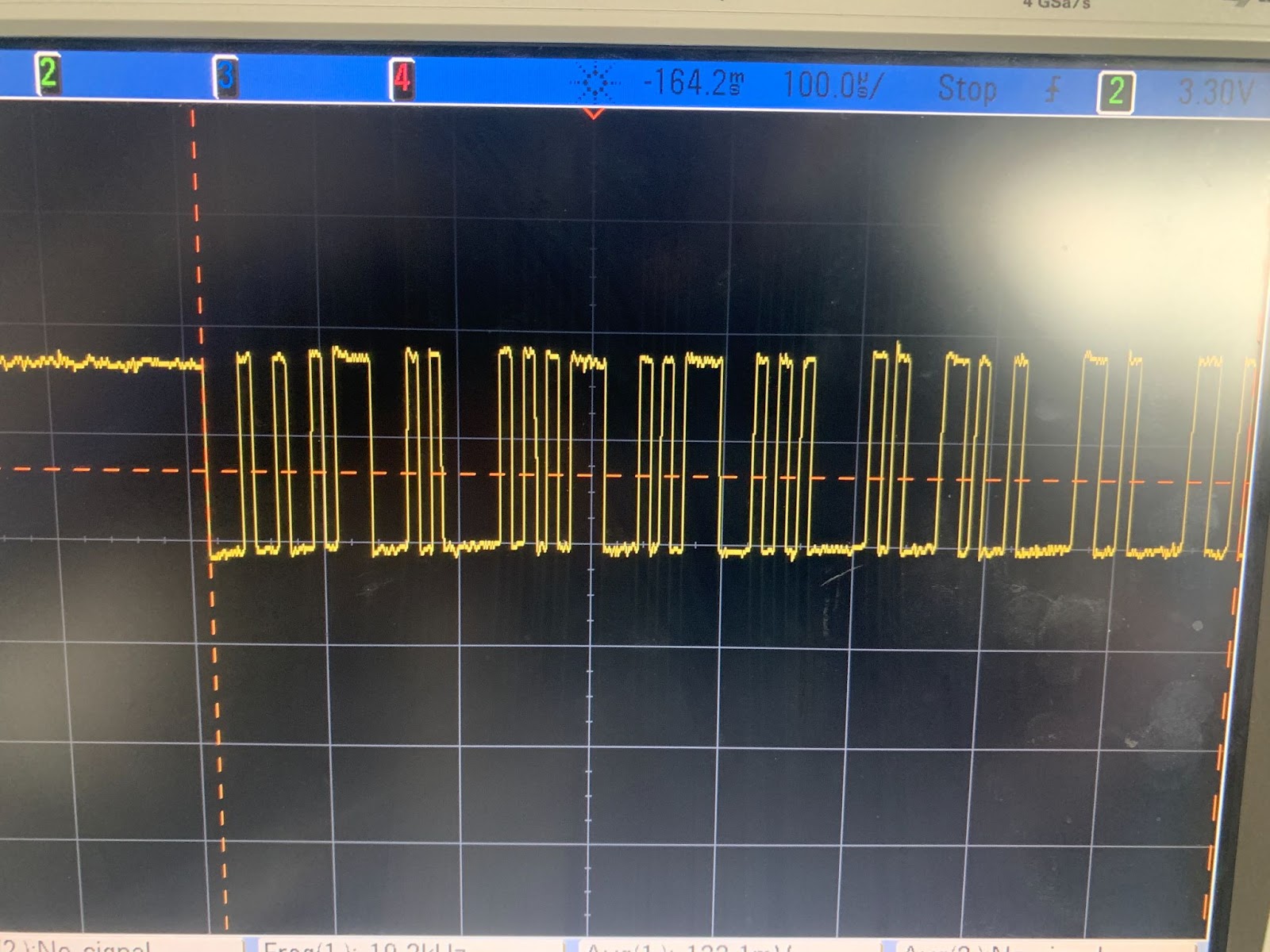
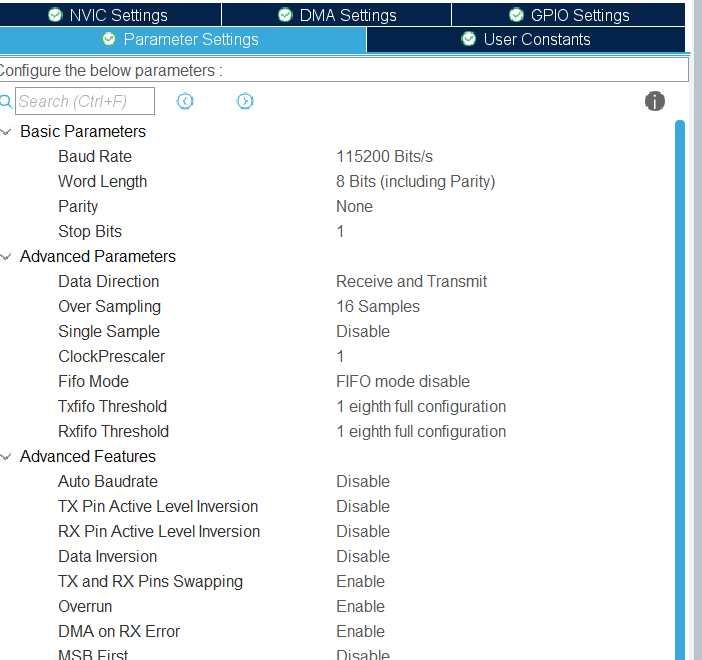
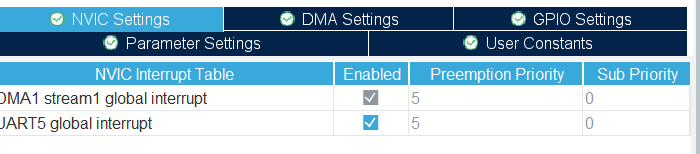
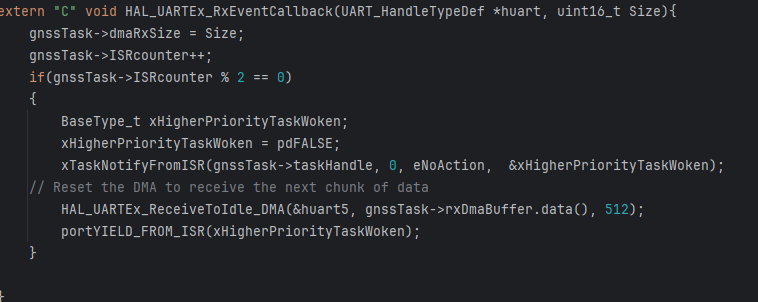
- Check the UART communication
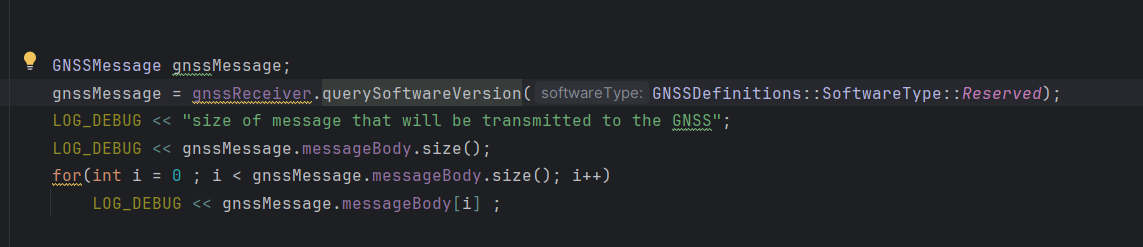
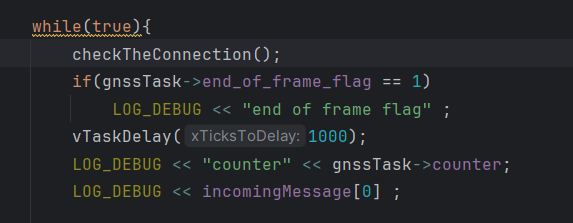
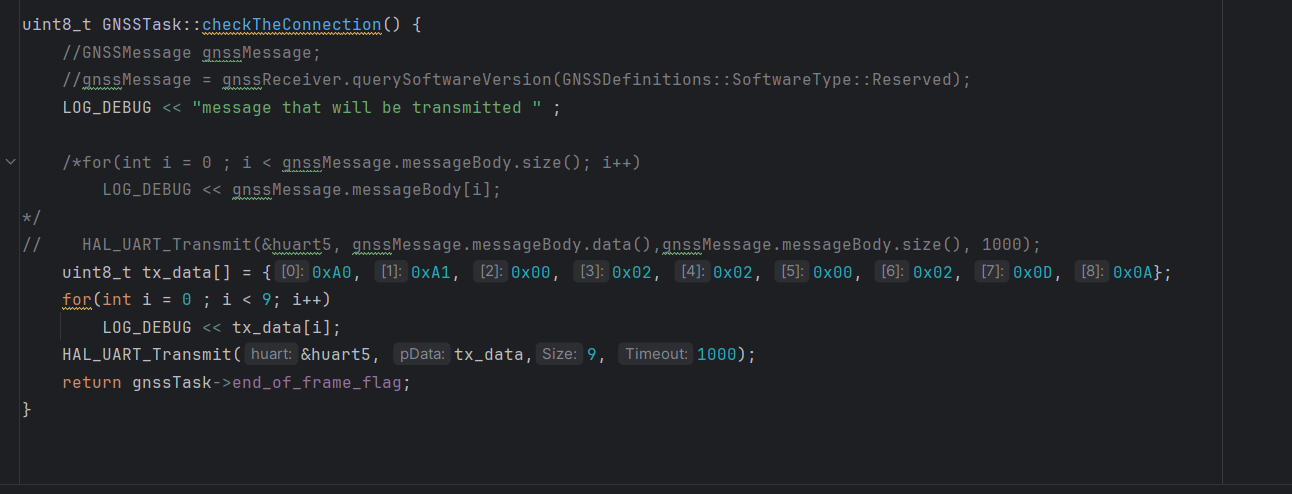
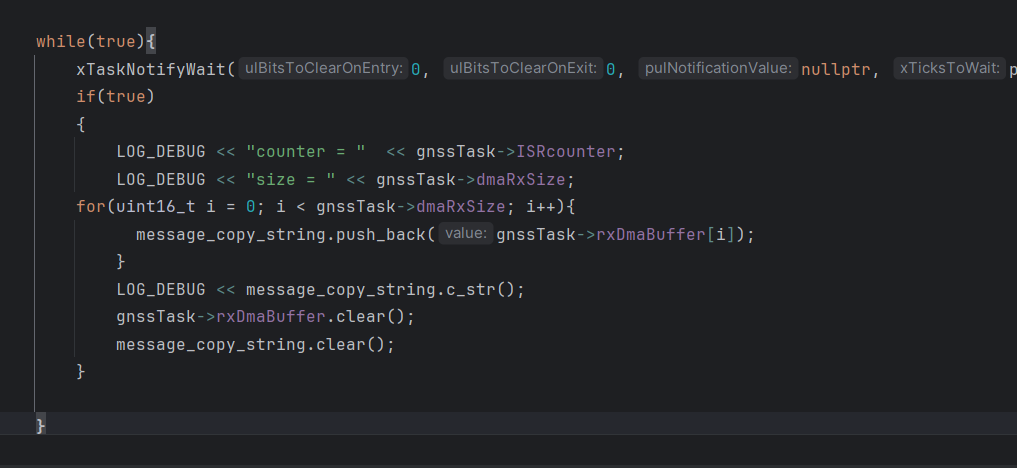
- Review and understand the current code
- Simplify or reduce the complexity of the code if it is needed


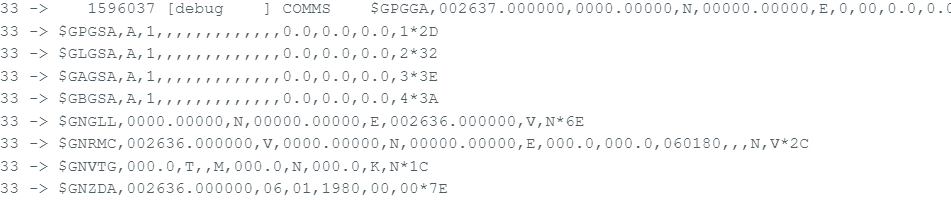

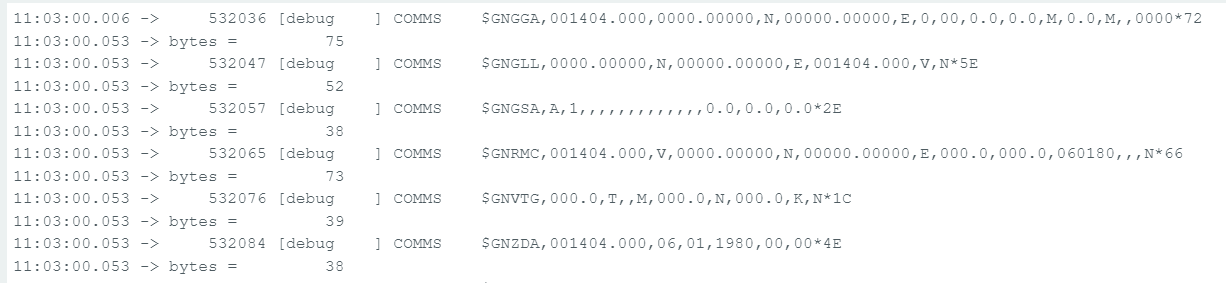
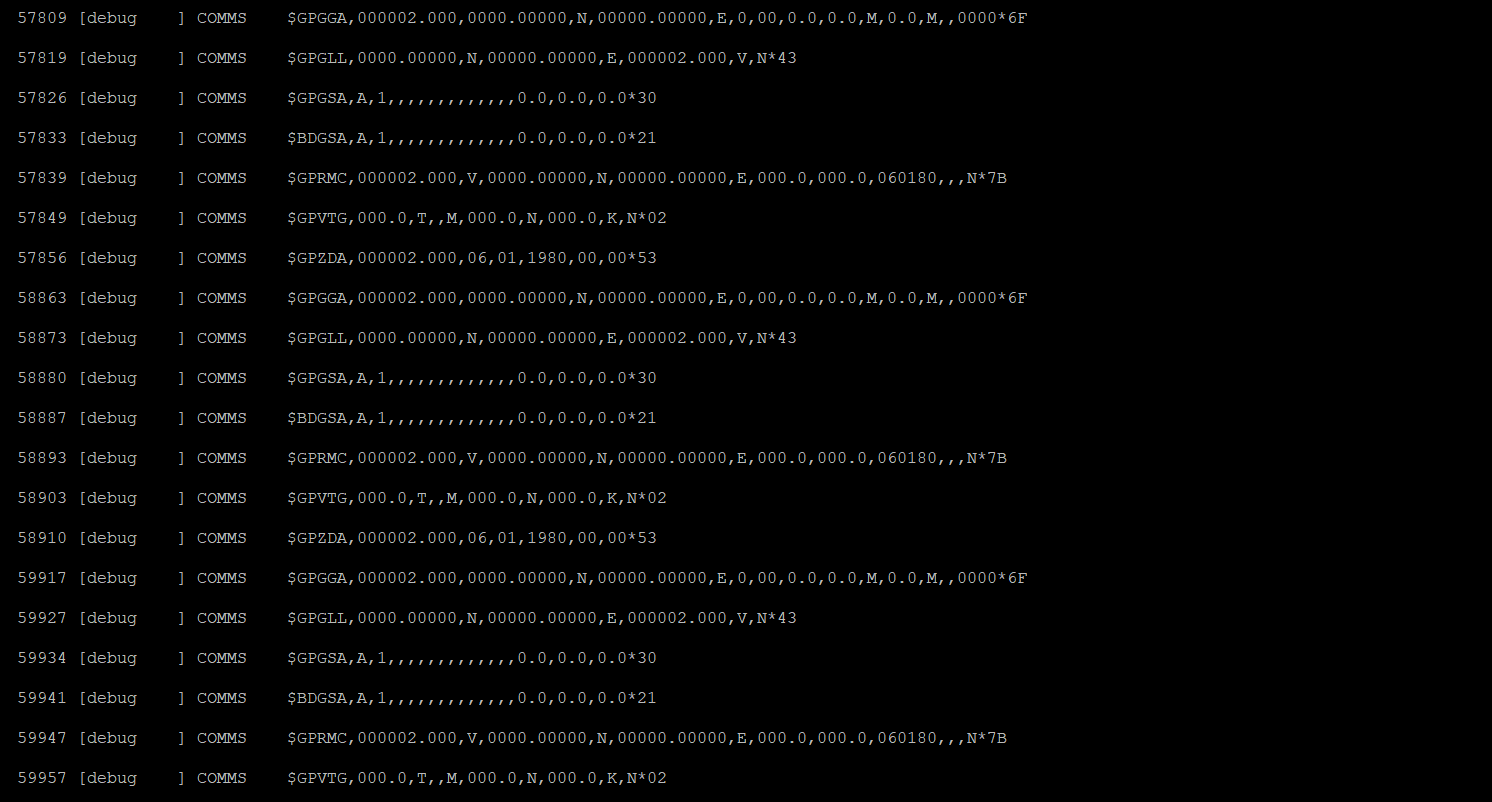
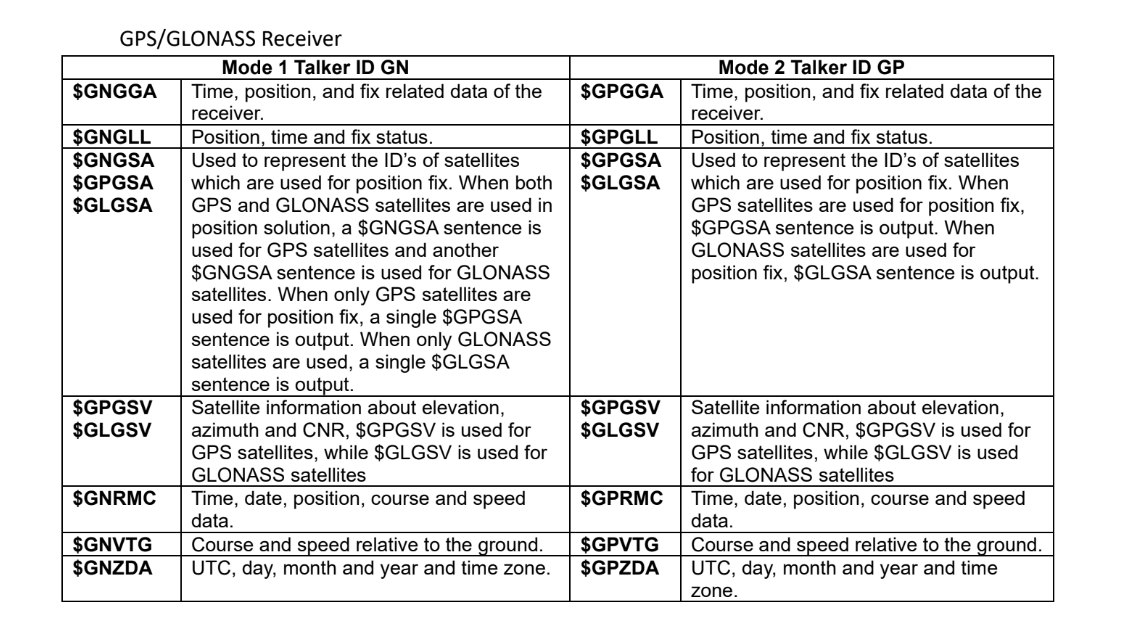
 From GP ( GPS ) we go to GN with the connection of the antenna. GN stands for GLONASS satellites.
From GP ( GPS ) we go to GN with the connection of the antenna. GN stands for GLONASS satellites.

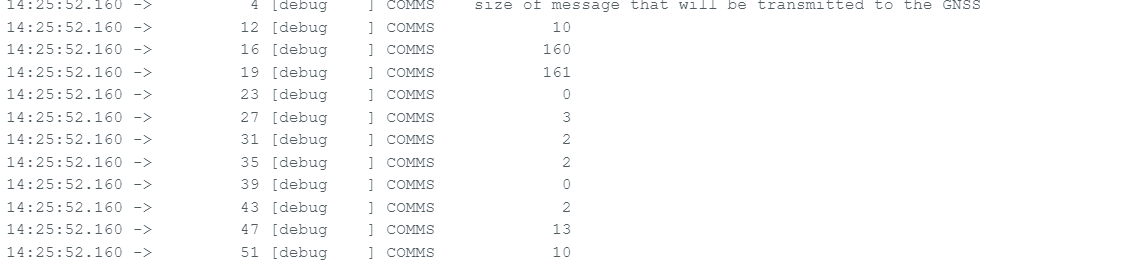

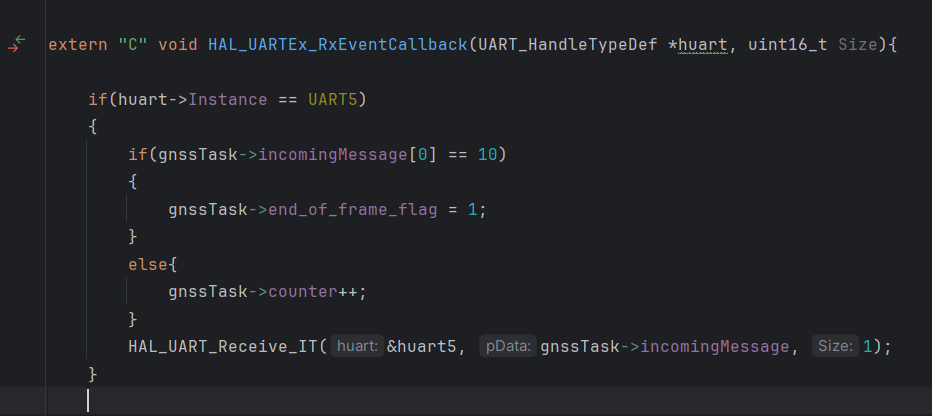
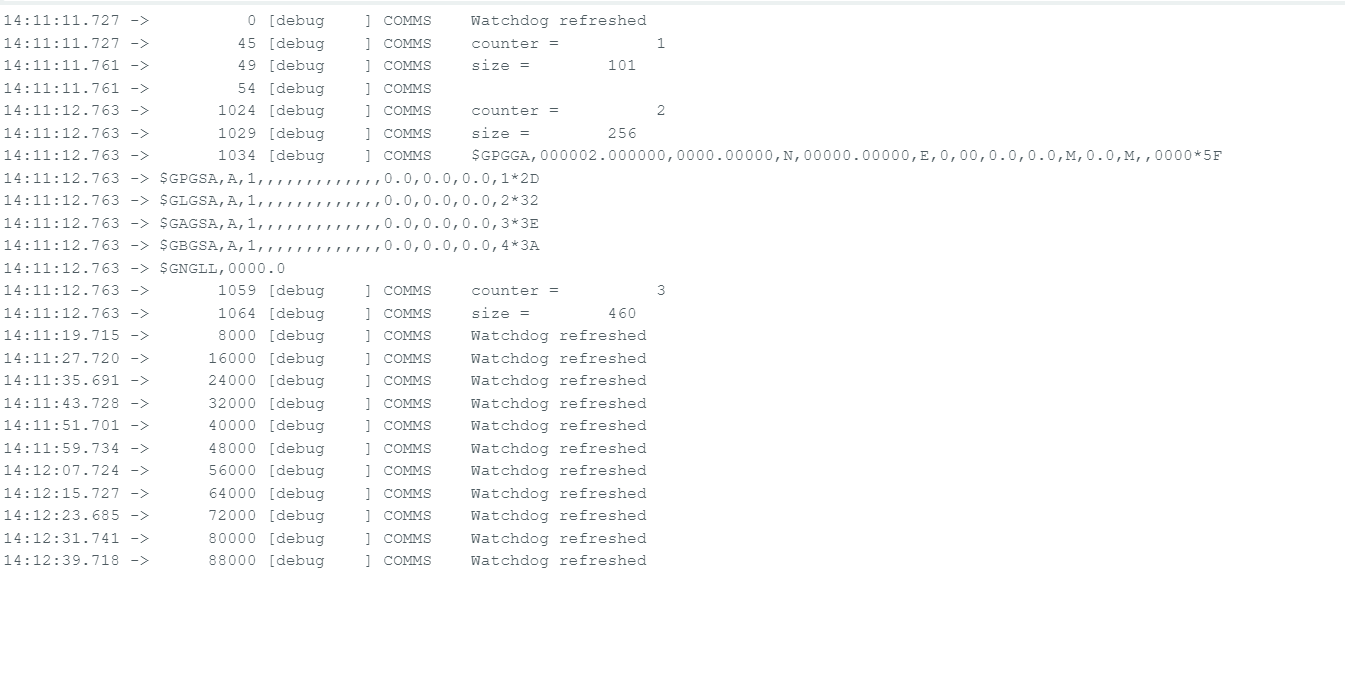
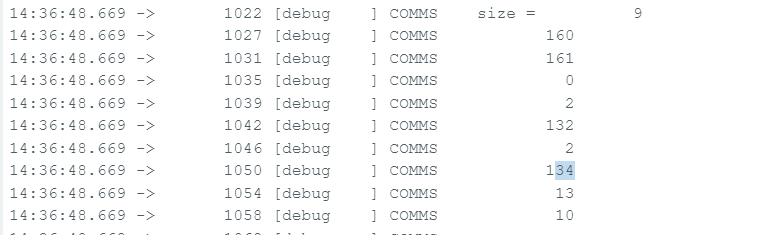
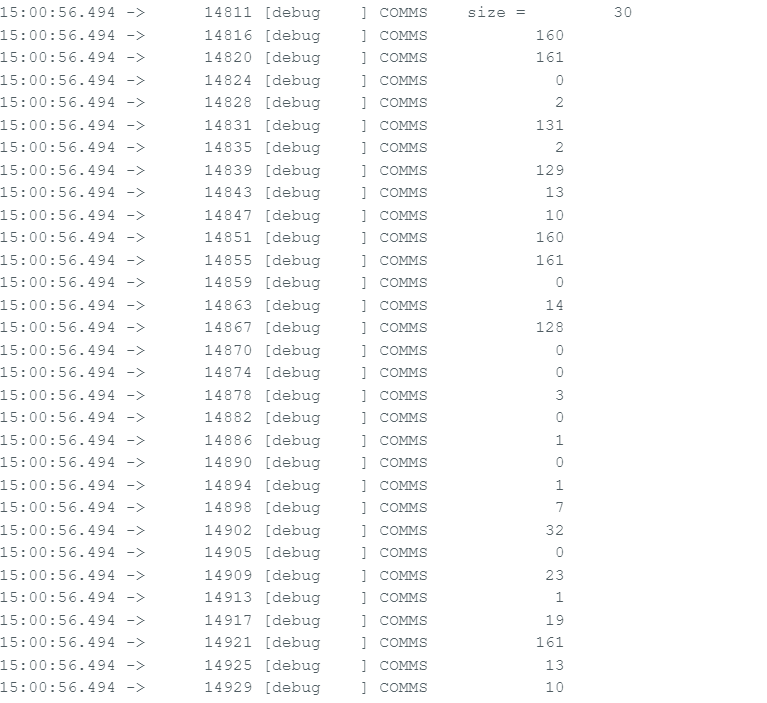


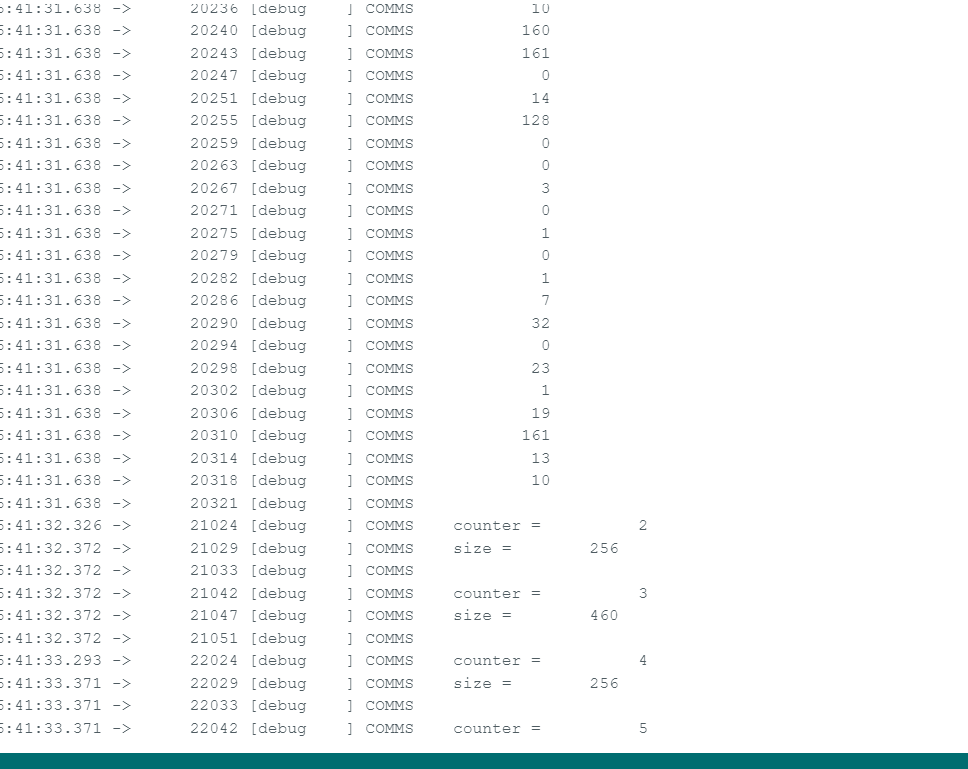

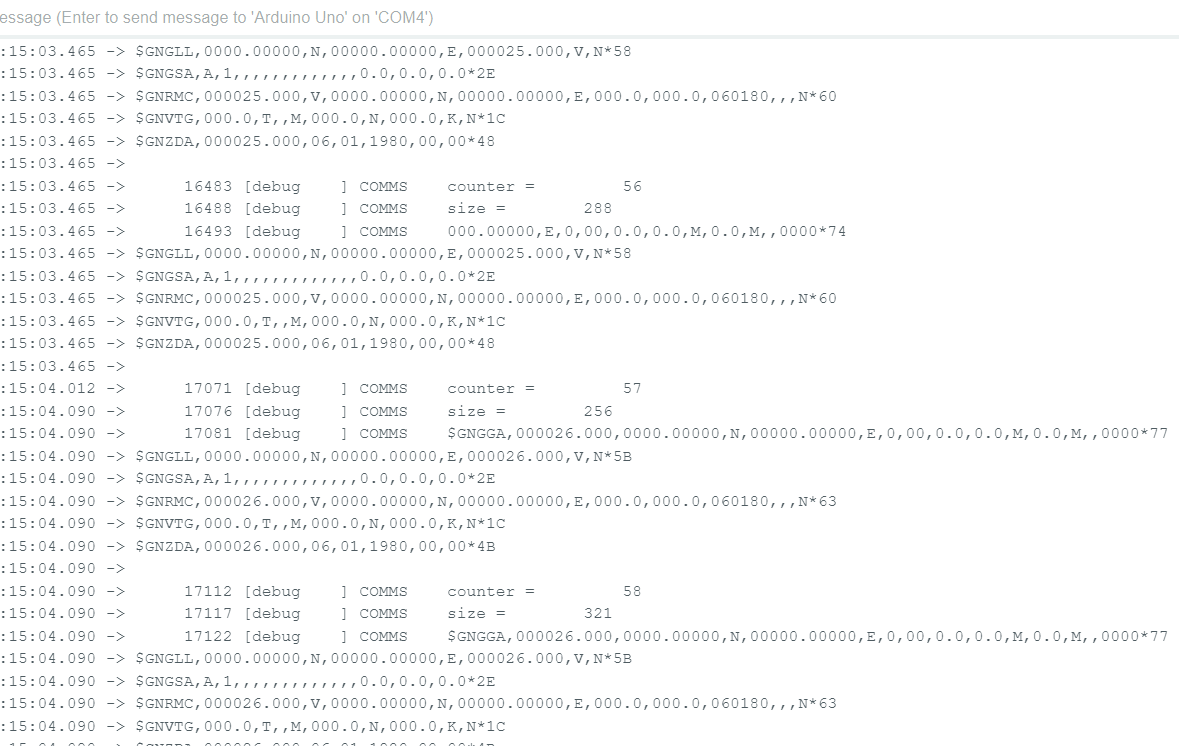
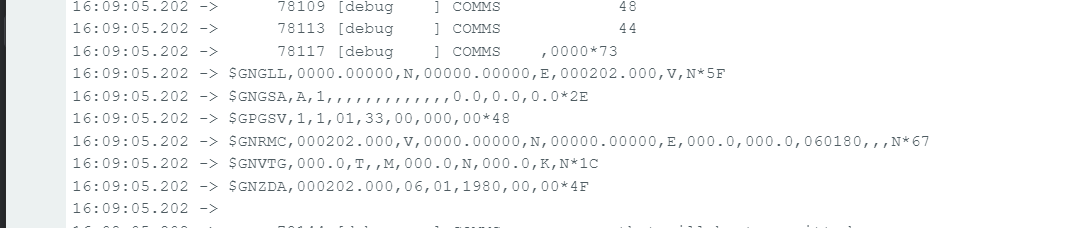
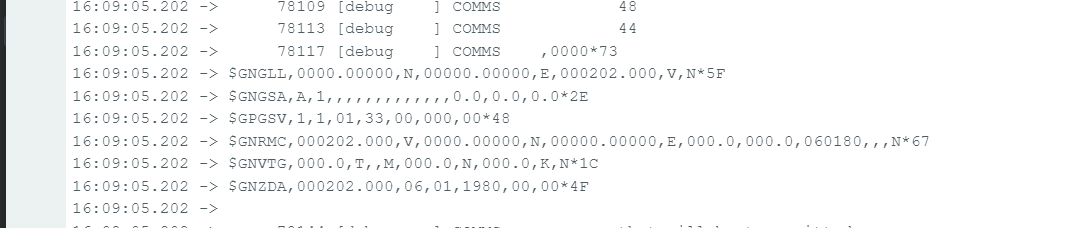
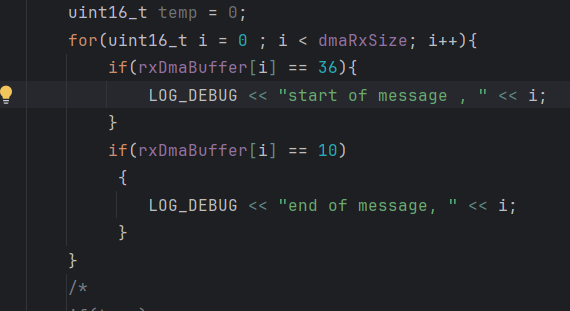
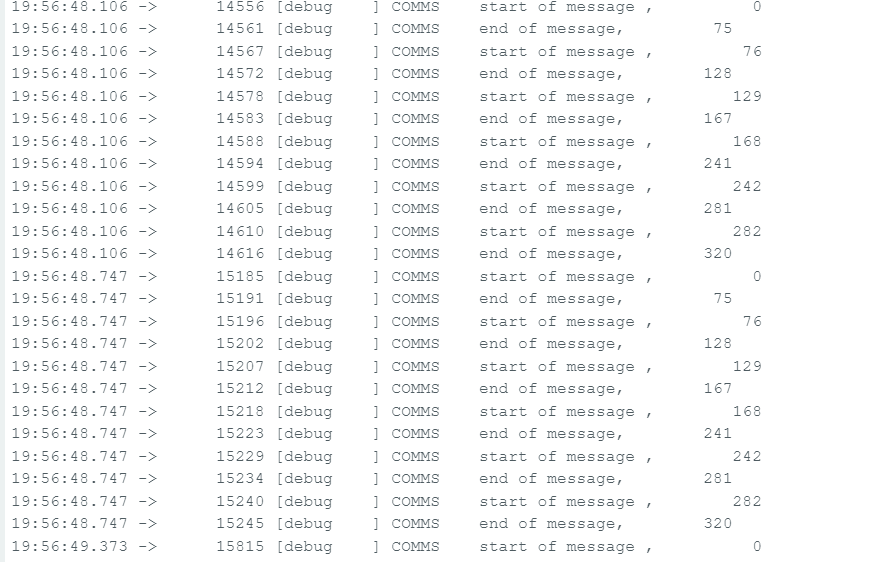
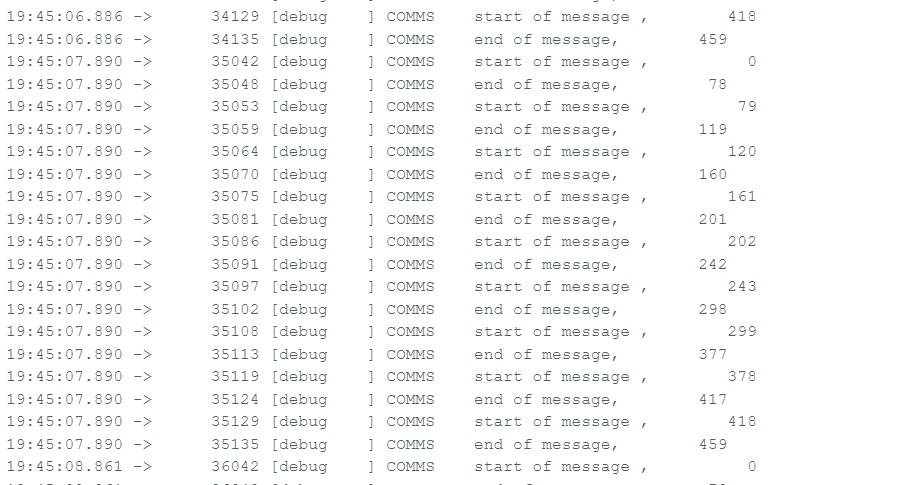 36 in ASCII is the char $. As you can see, the GNSS automatically generates 9 messages, which contain 460 bytes in total ( this test is without the active antenna ):
36 in ASCII is the char $. As you can see, the GNSS automatically generates 9 messages, which contain 460 bytes in total ( this test is without the active antenna ):