 Crayder
commented
9 years ago
Crayder
commented
9 years ago Kinda lol moment. I'm completely new to the normals and shit, I came up with the following but it doesn't work. I figured it'd be something along those lines.
stock SurfaceNormals(Float:P1[3], Float:P2[3], Float:P3[3], &Float:normX, &Float:normY, &Float:normZ, &Float:vectX, &Float:vectY, &Float:vectZ)
{
//Normal of three points?
normX = (P2[0] - P1[0]) * (P3[0] - P1[0]);
normY = (P2[1] - P1[1]) * (P3[1] - P1[1]);
normZ = (P2[2] - P1[2]) * (P3[2] - P1[2]);
//Make sum of 'vect' come out as 1, it shouldn't be 0.
vectX = normX / (floatabs(normX) + floatabs(normY) + floatabs(normZ));
vectY = normY / (floatabs(normX) + floatabs(normY) + floatabs(normZ));
vectZ = normZ / (floatabs(normX) + floatabs(normY) + floatabs(normZ));
}
stock CA_SurfaceNormals(Float:StartX, Float:StartY, Float:StartZ, Float:EndX, Float:EndY, Float:EndZ, &Float:normX, &Float:normY, &Float:normZ, &Float:vectX, &Float:vectY, &Float:vectZ)
{
new Float:P1[3], Float:P2[3], Float:P3[3];
//floatsin(120, degrees) = 0.86602540378443864676372317075294
//floatcos(120, degrees) = -0.5000000000000000000000000000000
//floattan(120, degrees) = -1.7320508075688772935274463415059
//Get three points on a surface (NOT the best method but yea).
CA_RayCastLine(StartX, StartY, StartZ,
EndX + 0.01, EndY + 0.01, EndZ,
P1[0], P1[1], P1[2]);
CA_RayCastLine(StartX, StartY, StartZ,
EndX, EndY + 0.01, EndZ + 0.01,
P2[0], P2[1], P2[2]);
CA_RayCastLine(StartX, StartY, StartZ,
EndX + 0.01, EndY, EndZ + 0.01,
P3[0], P3[1], P3[2]);
SurfaceNormals(P1, P2, P3, normX, normY, normZ, vectX, vectY, vectZ);
}The vectors of the CA func always come out to one of the following (it seems):
0, 0, 0
0, 1, 0
0, 0, 1 Pottus
Pottus codectile
codectile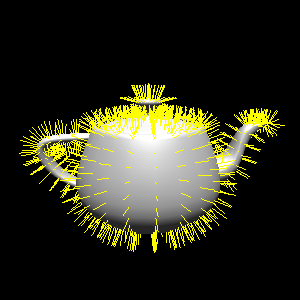
 Their mesh looks like this:
Their mesh looks like this:
 We just need a way to detect the exact face collided and take it's three points (or three points on the face), calculate the normal vectors, convert to angles.
We just need a way to detect the exact face collided and take it's three points (or three points on the face), calculate the normal vectors, convert to angles.  Here are their collisions:
Here are their collisions:
 And finally, the wireframes:
And finally, the wireframes:
 As you can see, the only basketball that would work from your defensive example is 3065, the only one with a collision (and therefore, a tri-mesh).
As you can see, the only basketball that would work from your defensive example is 3065, the only one with a collision (and therefore, a tri-mesh).

 ikkentim
ikkentim
This function needs to be updated to return the correct rx/ry/rz angles for in game objects. I've tried a lot of different things but I am still unsure how to accurately translate the normal to an object rotation in that the object would align perpendicular to the orientation of the collision plane.
I am hoping some math guys out there could figure out the steps to do this correctly it is very important for advanced mapping features.